“Ultrasonic Distance Sensor”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) (→产品说明) |
Yousimaier17(讨论 | 贡献) |
||
| 第41行: | 第41行: | ||
*[[File:Ultrasonic Distance Sensor _HC-SR04.jpg|600px]] | *[[File:Ultrasonic Distance Sensor _HC-SR04.jpg|600px]] | ||
*'''引脚说明''' | *'''引脚说明''' | ||
| − | ** | + | **1、VCC:电源正极,接电压3V-5.5V |
| − | **2、Trig/Rx/ | + | **2、Trig/Rx/SCL: |
| − | **3、Echo/Tx/ | + | *** |
| − | ** | + | **3、Echo/Tx/SDA: |
| + | **4、GND: | ||
*'''功能选择端说明''' | *'''功能选择端说明''' | ||
2022年8月25日 (四) 14:23的版本
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||
.jpg)
.jpg)
.jpg)
目录
产品概述
超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。具体为:两个压电陶瓷超声传感器一个用于发出超声波信号,一个用于接收反射回来的超声波信号。由于发出信号和接收信号都比较微弱,所以需要通过外围信号放大器提高发出信号的功率,和将反射回来信号进行放大,以能更稳定地将信号传输给单片机。超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。
工作原理
HC-SR04
HY-SRF05
US-100
参数说明

产品说明
HC-SR04

- 引脚说明
- 1、VCC:电源正极,接电压3V-5.5V
- 2、Trig/Rx/SCL:
- 3、Echo/Tx/SDA:
- 4、GND:
- 功能选择端说明

HY-SRF05

- 引脚说明
- 1、VCC:
- 2、
- 3、
- 4、
- 5、

US-100
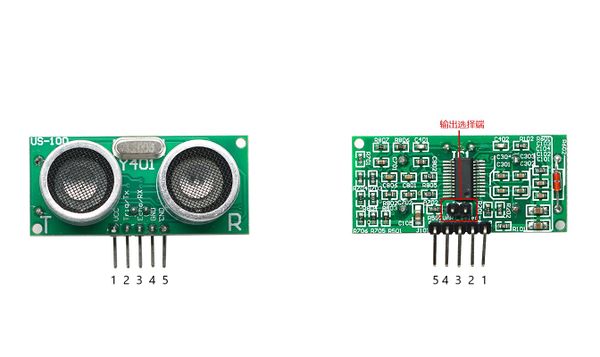
- 引脚说明
- 1、VCC:
- 2、
- 3、
- 4、
- 功能选择端说明

原理图
参考例程
注意事项
- 此模块不宜带电连接,如果要带电连接,则先连接模块的GND。
- 如果测试面不是很规则或测试远距离物体时,可采用多次测量的方法来校正。
- 两次测试间隔要不小于200ms。
FAQ
|
