“实验二十四:超声波传感器实验”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) |
Yousimaier17(讨论 | 贡献) (→电路连接) |
||
| (未显示同一用户的6个中间版本) | |||
| 第3行: | 第3行: | ||
== 模式选择 == | == 模式选择 == | ||
| − | + | *[[File:实验二十四:HC-SR04超声波传感器实验_模式选择.png|400px]] | |
| − | |||
| − | |||
| − | |||
| − | |||
== 模式说明 == | == 模式说明 == | ||
| 第40行: | 第36行: | ||
=== 1-Wire模式 === | === 1-Wire模式 === | ||
| − | * | + | *[[File:实验二十四:HC-SR04超声波传感器实验_1-wire模式.png|800px]] |
*外部 MCU 初始设置为输出,给模块 I/O 脚一个大于 10uS 的高电平脉冲;输出脉冲信号后,MCU 设置 为输入模式,等待模块给出的一个与距离等比的高电平脉冲信号;测量结束后 MCU 设置为输出模式,进行下次测量。 | *外部 MCU 初始设置为输出,给模块 I/O 脚一个大于 10uS 的高电平脉冲;输出脉冲信号后,MCU 设置 为输入模式,等待模块给出的一个与距离等比的高电平脉冲信号;测量结束后 MCU 设置为输出模式,进行下次测量。 | ||
*声速可根据脉宽时间“T”算出: 距离=T*C/2 (C 为声速) | *声速可根据脉宽时间“T”算出: 距离=T*C/2 (C 为声速) | ||
| 第47行: | 第43行: | ||
**20℃声速: 342.62M/S | **20℃声速: 342.62M/S | ||
**40℃声速: 354.85M/S | **40℃声速: 354.85M/S | ||
| − | **0℃-40℃声速误差 7%左右。实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。 | + | **0℃-40℃声速误差 7%左右。实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。 |
| − | |||
== Arduino == | == Arduino == | ||
| 第56行: | 第51行: | ||
=== 电路连接 === | === 电路连接 === | ||
| − | * | + | *[[File:实验二十四:HC-SR04超声波传感器实验_接线.png|400px]] |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
=== 主要程序 === | === 主要程序 === | ||
| 第91行: | 第81行: | ||
== 树莓派 == | == 树莓派 == | ||
| + | *'''以GPIO模式为例''' | ||
=== 电路连接 === | === 电路连接 === | ||
| − | * | + | *[[File:实验二十四:HC-SR04超声波传感器实验_接线1.png|600px]] |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
=== 程序运行 === | === 程序运行 === | ||
| 第122行: | 第107行: | ||
</pre> | </pre> | ||
*此时可看见树莓派在正确运行程序,若想退出,按ctrl+C即可 | *此时可看见树莓派在正确运行程序,若想退出,按ctrl+C即可 | ||
| − | *指令说明:'''gpiozero.InputDevice(pin, pull_up, active_state | + | *指令说明:'''gpiozero.InputDevice(pin, pull_up, active_state)''' |
**主要参数: | **主要参数: | ||
***pin:GPIO口编号; | ***pin:GPIO口编号; | ||
| 第135行: | 第120行: | ||
****当pull_up设置为True或者False时,引脚的活动状态被将自动赋值 | ****当pull_up设置为True或者False时,引脚的活动状态被将自动赋值 | ||
| − | *指令说明:'''gpiozero.OutputDevice(pin | + | *指令说明:'''gpiozero.OutputDevice(pin, active_high, initial_value)''' |
**主要参数: | **主要参数: | ||
***pin: GPIO口编号, | ***pin: GPIO口编号, | ||
| 第142行: | 第127行: | ||
****设置为Flase时,on()将引脚设置为LOW,off()将引脚设置为High。 | ****设置为Flase时,on()将引脚设置为LOW,off()将引脚设置为High。 | ||
***initial_value: | ***initial_value: | ||
| − | ***如果为False(默认值),则所有LED初始状态为关闭。 | + | ****如果为False(默认值),则所有LED初始状态为关闭。 |
| − | ***如果为None,则所有LED初始状态不稳定。 | + | ****如果为None,则所有LED初始状态不稳定。 |
| − | ***如果为True,则所有LED初始状态为关闭打开。 | + | ****如果为True,则所有LED初始状态为关闭打开。 |
*更多指令请查看[https://gpiozero.readthedocs.io/en/latest/installing.html gpiozero文档] | *更多指令请查看[https://gpiozero.readthedocs.io/en/latest/installing.html gpiozero文档] | ||
2024年12月6日 (五) 12:04的最新版本
目录
模式选择

模式说明
GPIO模式
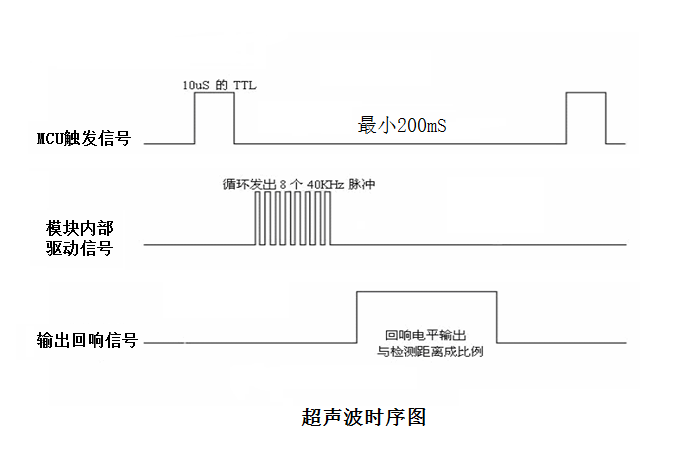
- 工作模式同老版本HC-SR04。外部MCU给模块Trig脚一个大于10uS的高电平脉冲;模块会给出一个与距离等比的高电平脉冲信号,
- 可根据脉宽时间“T”算出:距离=T*C/2 (C为声速)
- 声速温度公式:c=(331.45+0.61t/℃)m•s-1 (其中330.45是在0℃) 其中:
- 0℃声速: 330.45M/S
- 20℃声速: 342.62M/S
- 40℃声速: 354.85M/S
- 0℃-40℃声速误差7%左右。实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。
_GPIO.png)
IIC模式
- IIC地址: 0X57
- IIC传输格式:
- 写数据:

- 读数据:

- 写数据:
- 命令格式:

- 向模块写入0X01,模块开始测距;等待200mS(模块最大测距时间)以上。直接读出3个距离数据。BYTE_H,BYTE_M与BYTE_L。
- 距离计算方式如下(单位mm):
- 距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000
- 距离=( BYTE_H*65536 + BYTE_M*256 + BYTE_L )/1000
_IIC_1.png)
_IIC_2.png)
_IIC.jpg)
UART模式
- UART模式:波特率9600,起始位1位,停止位1位,数据位8位,无奇偶校验位,无流控制
- 连接串口。外部MCU或PC发命令0XA0,模块完成测距后发3个返回距离数据,BYTE_H,BYTE_M与BYTE_L。
- 距离计算方式如下(单位mm):
- 距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000
- 距离=( BYTE_H*65536 + BYTE_M*256 + BYTE_L )/1000
1-Wire模式
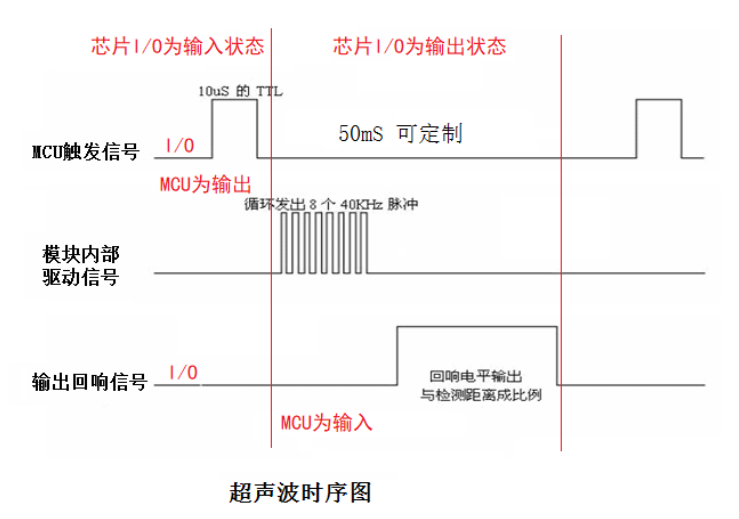
- 外部 MCU 初始设置为输出,给模块 I/O 脚一个大于 10uS 的高电平脉冲;输出脉冲信号后,MCU 设置 为输入模式,等待模块给出的一个与距离等比的高电平脉冲信号;测量结束后 MCU 设置为输出模式,进行下次测量。
- 声速可根据脉宽时间“T”算出: 距离=T*C/2 (C 为声速)
- 声速温度公式:c=(331.45+0.61t/℃)m•s-1 (其中 330.45 是在 0℃)
- 0℃声速: 330.45M/S
- 20℃声速: 342.62M/S
- 40℃声速: 354.85M/S
- 0℃-40℃声速误差 7%左右。实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿。

Arduino
- 以GPIO模式为例
实验现象
- 通过串口打印模块测量到的距离
电路连接

主要程序
float distance;
const int echo=A4; //echO接A4脚
const int trig=A5; //trig接A5脚
void setup()
{
Serial.begin(9600); //波特率9600
pinMode(echo,INPUT); //设置echo为输入脚
pinMode(trig,OUTPUT); //设置trig为输出脚
Serial.println(" RCWL-1XXX-TTL 测距开始:");
}
void loop()
{
digitalWrite(trig,HIGH);
delayMicroseconds(1);
digitalWrite(trig,LOW);
distance = pulseIn(echo,HIGH); //计数接收高电平时间
distance = distance*340/2/10000; //计算距离 1:声速:340M/S 2:实际距离为1/2声速距离 3:计数时钟为1US//温补公式:c=(331.45+0.61t/℃)m•s-1 (其中331.45是在0度)
Serial.print("距离: ");
Serial.print(distance);
Serial.println("CM");
delay(30); //单次测离完成后加30mS的延时再进行下次测量。防止近距离测量时,测量到上次余波,导致测量不准确。
delay(100); //延时100mS再次测量,延时可不要
}
树莓派
- 以GPIO模式为例
电路连接

程序运行
Python
- 安装gpiozero库
- 可以使下面命令来安装该库
sudo apt update sudo apt install python3-gpiozero
- 其它树莓派上的系统可以使下面命令来安装该库:
sudo pip3 install gpiozero
- 运行以下语句可以查看树莓派GPIO口定义
pinout
- 下载树莓派参考例程,将文件解压后拷贝放在用户名目录下,运行
cd raspberrypi/24/python_gpiozero python sensor.py
- 此时可看见树莓派在正确运行程序,若想退出,按ctrl+C即可
- 指令说明:gpiozero.InputDevice(pin, pull_up, active_state)
- 主要参数:
- pin:GPIO口编号;
- pull_up: 内部上下拉电阻设置,
- 设置为True时,GPIO引脚通过内部上拉电阻被拉高
- 设置为Flase(默认)时,GPIO引脚通过内部下拉电阻被拉低
- 设置为None时,GPIO引脚悬空,gpiozero无法猜测活动状态,必须设置active_state
- active_state:
- 设置为True时,当硬件引脚状态为“高”,软件显示引脚状态也为“高”
- 设置为False时,则输入的极性相反,当硬件引脚状态为“高”,软件显示引脚状态为“低”
- 当pull_up设置为None时,使用该参数设置未知的引脚活动状态
- 当pull_up设置为True或者False时,引脚的活动状态被将自动赋值
- 主要参数:
- 指令说明:gpiozero.OutputDevice(pin, active_high, initial_value)
- 主要参数:
- pin: GPIO口编号,
- active_high: 内部上下拉电阻设置,
- 设置为True(默认)时,on()将引脚设置为High,off()将引脚设置为LOW。
- 设置为Flase时,on()将引脚设置为LOW,off()将引脚设置为High。
- initial_value:
- 如果为False(默认值),则所有LED初始状态为关闭。
- 如果为None,则所有LED初始状态不稳定。
- 如果为True,则所有LED初始状态为关闭打开。
- 主要参数:
- 更多指令请查看gpiozero文档