“Ultrasonic Distance Sensor”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) (→参数说明) |
Yousimaier17(讨论 | 贡献) (→原理图) |
||
| (未显示同一用户的27个中间版本) | |||
| 第27行: | 第27行: | ||
== 工作原理== | == 工作原理== | ||
| − | |||
超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/200) | 超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/200) | ||
| − | *[[File:Ultrasonic Distance Sensor_原理.png|600px]] | + | **[[File:Ultrasonic Distance Sensor_原理.png|600px]] |
| − | |||
| − | |||
| − | |||
| − | |||
| − | |||
== 参数说明 == | == 参数说明 == | ||
| + | *[[File:Ultrasonic Distance Sensor_参数说明.png|800px]] | ||
| − | + | == 使用说明 == | |
| − | |||
| − | == | ||
=== HC-SR04 === | === HC-SR04 === | ||
| + | ==== 引脚说明 ==== | ||
*[[File:Ultrasonic Distance Sensor _HC-SR04.jpg|600px]] | *[[File:Ultrasonic Distance Sensor _HC-SR04.jpg|600px]] | ||
*'''引脚说明''' | *'''引脚说明''' | ||
**1、VCC:电源正极,接电压3V-5.5V | **1、VCC:电源正极,接电压3V-5.5V | ||
**2、Trig/Rx/SCL/ I/O:接收MCU发送的控制脉冲 | **2、Trig/Rx/SCL/ I/O:接收MCU发送的控制脉冲 | ||
| − | ***GPIO模式:Trig | + | ***GPIO模式:Trig 触发信号,接外部电路的Trig端 |
| − | ***UART模式:Rx | + | ***UART模式:Rx 接收信号,接外部电路的Tx端 |
| − | ***IIC模式:SCL | + | ***IIC模式:SCL 时钟信号,接外部电路的SCL端 |
***1-Wire模式:I/O 接收/发送信号 | ***1-Wire模式:I/O 接收/发送信号 | ||
**3、Echo/Tx/SDA:向MCU发送数据脉冲 | **3、Echo/Tx/SDA:向MCU发送数据脉冲 | ||
| − | ***GPIO模式:Echo | + | ***GPIO模式:Echo 反馈信号,接外部电路的Echo端 |
| − | ***UART模式:Tx | + | ***UART模式:Tx 发射信号,接外部电路的Rx端 |
| − | ***IIC模式:SDA | + | ***IIC模式:SDA 数据信号,接外部电路的SDA端 |
**4、GND:电源负极,接地 | **4、GND:电源负极,接地 | ||
*'''功能选择端说明''' | *'''功能选择端说明''' | ||
| + | **[[File:Ultrasonic Distance Sensor (HC-SR04)_引脚说明.png|800px]] | ||
| + | |||
| + | ==== 操作说明 ==== | ||
| + | *实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿 | ||
| + | *'''GPIO模式''' | ||
| + | **[[File:Ultrasonic Distance Sensor (HC-SR04)_GPIO.png|800px]] | ||
| + | **工作模式同老版本HC-SR04。外部MCU给模块Trig脚一个大于10uS的高电平脉冲;模块会给出一个与距离等比的高电平脉冲信号, | ||
| + | **可根据脉宽时间“T”算出:距离=T*C/2 (C为声速) | ||
| + | **声速温度公式:c=(331.45+0.61t/℃)m•s-1 (其中330.45是在0℃) 其中: | ||
| + | ***0℃声速: 330.45M/S | ||
| + | ***20℃声速: 342.62M/S | ||
| + | ***40℃声速: 354.85M/S | ||
| + | ***0℃-40℃声速误差7%左右。 | ||
| + | |||
| + | *'''UART模式''' | ||
| + | **UART模式:波特率9600,起始位1位,停止位1位,数据位8位,无奇偶校验位,无流控制 | ||
| + | **连接串口。外部MCU或PC发命令0XA0,模块完成测距后发3个返回距离数据,BYTE_H,BYTE_M与BYTE_L。 | ||
| + | **距离计算方式如下(单位mm): | ||
| + | ***距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000 | ||
| + | |||
| + | *'''IIC模式''' | ||
| + | **IIC地址: 0X57 | ||
| + | **IIC传输格式: | ||
| + | ***写数据:[[File:Ultrasonic Distance Sensor (HC-SR04)_IIC_1.png|600px]] | ||
| + | ***读数据:[[File:Ultrasonic Distance Sensor (HC-SR04)_IIC_2.png|600px]] | ||
| + | **命令格式:[[File:Ultrasonic Distance Sensor (HC-SR04)_IIC.jpg|600px]] | ||
| + | **向模块写入0X01,模块开始测距;等待200mS(模块最大测距时间)以上。直接读出3个距离数据。BYTE_H,BYTE_M与BYTE_L。 | ||
| + | **距离计算方式如下(单位mm):距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000 | ||
=== HY-SRF05 === | === HY-SRF05 === | ||
| + | ==== 引脚说明 ==== | ||
*[[File:Ultrasonic Distance Sensor _HY-SRF05.jpg|600px]] | *[[File:Ultrasonic Distance Sensor _HY-SRF05.jpg|600px]] | ||
*'''引脚说明''' | *'''引脚说明''' | ||
| − | ** | + | **1、VCC:电源正极,接电压5V DC |
| − | ** | + | **2、Trig:触发信号,接收MCU发送的控制脉冲 |
| − | ** | + | **3、Echo:反馈信号,向MCU发送数据脉冲 |
| − | ** | + | **4、OUT:开关量输出端 |
| − | * | + | **5、GND:电源负极,接地 |
| + | |||
| + | ==== 操作说明 ==== | ||
| + | *[[File:Ultrasonic Distance Sensor (HC-SR04)_GPIO.png|800px]] | ||
| + | *MCU通过Trig端口向模块提供一个10uS 以上脉冲触发信号。 | ||
| + | *模块内部自动发出8个40kHz周期的方波信号,检测是否有信号返回。 | ||
| + | *检测到有回波信号则通过Echo端口输出回响信号。回响信号的脉冲宽度与所测的距离成正比。 | ||
| + | *发射信号到收到的回响信号时间间隔可以计算得到距离。 | ||
| + | *公式:uS/58=厘米 或 uS/148=英寸 或 距离=高电平时间*声速(340M/S)12: | ||
| + | *建议测量周期为60ms 以上,以防止发射信号对回响信号的影响。 | ||
| + | |||
=== US-100 === | === US-100 === | ||
| + | ==== 引脚说明 ==== | ||
*[[File:Ultrasonic Distance Sensor _US-100.jpg|600px]] | *[[File:Ultrasonic Distance Sensor _US-100.jpg|600px]] | ||
| − | * | + | **1、VCC:电源正极,接电压2.4V-5.5V |
| − | ** | + | **2、Trig/Tx:接收MCU发送的控制脉冲 |
| − | ** | + | ***GPIO模式:Trig 触发信号,接外部电路的Trig端 |
| − | ** | + | ***UART模式:Tx 接收信号,接外部电路的Tx端 |
| − | ** | + | **3、Echo/Rx:向MCU发送数据脉冲 |
| + | ***GPIO模式:Echo 反馈信号,接外部电路的Echo端 | ||
| + | ***UART模式:Rx 发射信号,接外部电路的Rx端 | ||
| + | **4、GND:电源负极,接地 | ||
| + | **5、GND:电源负极,接地 | ||
*'''功能选择端说明''' | *'''功能选择端说明''' | ||
| + | **插上跳线帽时,为UART模式 | ||
| + | **拔掉跳线帽时,为GPIO模式 | ||
| + | |||
| + | ==== 操作说明 ==== | ||
| + | *'''GPIO测距模式''' | ||
| + | **[[File:Ultrasonic Distance Sensor (US-100)_1.png|600px]] | ||
| + | **在模块上电前,应先去掉模式选择跳线上的跳线帽,使模块处于电平触发模式。 | ||
| + | **在 Trig/TX 管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。 | ||
| + | **当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX 管脚输出。 | ||
| + | **在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过 Echo 端输出一高电平,可根据此高电平的持续时间来计算距离值。 | ||
| + | **即距离值为:(高电平时间*340m/s)/2。 | ||
| + | **注:因为距离值已经经过温度校正,此时无需再根据环境温度对超声波声速进行校正,即不管温度多少,声速选择340m/s 即可。 | ||
| + | |||
| + | *'''UART测距模式''' | ||
| + | **[[File:Ultrasonic Distance Sensor (US-100)_2.png|600px]] | ||
| + | **在模块上电前,应先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。 | ||
| + | **在 Trig/TX 管脚输入 0X55 (波特率 9600),系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。 | ||
| + | **当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过 Echo/RX管脚输出。 | ||
| + | **输出的距离值共两个字节,第一个字节是距离的高 8 位(HDate),第二个字节为距离的低 8 位(LData),单位为毫米。 | ||
| + | **即距离值为 (HData*256 +LData)mm。 | ||
| + | |||
| + | *'''UART测温模式''' | ||
| + | **[[File:Ultrasonic Distance Sensor (US-100)_3.png|600px]] | ||
| + | **在模块上电前,应先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。 | ||
| + | **在 Trig/TX 管脚输入 0X50 (波特率 9600),系统便启动温度传感器对当前温度进行测量,然后将温度值通过 Echo/RX 管脚输出。 | ||
| + | **测量完成温度后,本模块会返回一个字节的温度值(TData),实际的温度值为 TData-45。 | ||
| + | **例如通过 TX 发送完0X50 后,在 RX 端收到 0X45,则此时的温度值为69(0X45的10进制值)- 45 = 24度。 | ||
== 原理图 == | == 原理图 == | ||
| 第78行: | 第143行: | ||
*[[:File:Ultrasonic Distance Sensor (HY-SRF05)_原理图.pdf|HY-SRF05]] | *[[:File:Ultrasonic Distance Sensor (HY-SRF05)_原理图.pdf|HY-SRF05]] | ||
*[[:File:Ultrasonic Distance Sensor (US-100)_原理图.pdf|US-100]] | *[[:File:Ultrasonic Distance Sensor (US-100)_原理图.pdf|US-100]] | ||
| + | |||
| + | == 使用手册 == | ||
| + | *[[:File:HC-SR04(2020款).pdf|HC-SR04]] | ||
| + | *[[:File:HY-SRF05 使用手册明书.pdf|HY-SRF05]] | ||
| + | *[[:File:US100产品介绍V2.01.pdf|US-100]] | ||
== 参考例程 == | == 参考例程 == | ||
2023年5月6日 (六) 16:44的最新版本
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||
.jpg)
.jpg)
.jpg)
目录
产品概述
超声波模块主要是由两个通用的压电陶瓷超声传感器,并加外围信号处理电路构成的。具体为:两个压电陶瓷超声传感器一个用于发出超声波信号,一个用于接收反射回来的超声波信号。由于发出信号和接收信号都比较微弱,所以需要通过外围信号放大器提高发出信号的功率,和将反射回来信号进行放大,以能更稳定地将信号传输给单片机。超声波模块常用于机器人避障、物体测距、液位检测、公共安防、停车场检测等场所。
工作原理
超声波测距原理是在超声波发射装置发出超声波,它的根据是接收器接到超声波时的时间差,与雷达测距原理相似。 超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。(超声波在空气中的传播速度为340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离(s),即:s=340t/200)

参数说明

使用说明
HC-SR04
引脚说明

- 引脚说明
- 1、VCC:电源正极,接电压3V-5.5V
- 2、Trig/Rx/SCL/ I/O:接收MCU发送的控制脉冲
- GPIO模式:Trig 触发信号,接外部电路的Trig端
- UART模式:Rx 接收信号,接外部电路的Tx端
- IIC模式:SCL 时钟信号,接外部电路的SCL端
- 1-Wire模式:I/O 接收/发送信号
- 3、Echo/Tx/SDA:向MCU发送数据脉冲
- GPIO模式:Echo 反馈信号,接外部电路的Echo端
- UART模式:Tx 发射信号,接外部电路的Rx端
- IIC模式:SDA 数据信号,接外部电路的SDA端
- 4、GND:电源负极,接地
- 功能选择端说明

_%E5%BC%95%E8%84%9A%E8%AF%B4%E6%98%8E.png)
操作说明
- 实际应用,如果需要精确距离值,必需要考虑温度影响,做温度补偿
- GPIO模式
- 工作模式同老版本HC-SR04。外部MCU给模块Trig脚一个大于10uS的高电平脉冲;模块会给出一个与距离等比的高电平脉冲信号,
- 可根据脉宽时间“T”算出:距离=T*C/2 (C为声速)
- 声速温度公式:c=(331.45+0.61t/℃)m•s-1 (其中330.45是在0℃) 其中:
- 0℃声速: 330.45M/S
- 20℃声速: 342.62M/S
- 40℃声速: 354.85M/S
- 0℃-40℃声速误差7%左右。
_GPIO.png)
- UART模式
- UART模式:波特率9600,起始位1位,停止位1位,数据位8位,无奇偶校验位,无流控制
- 连接串口。外部MCU或PC发命令0XA0,模块完成测距后发3个返回距离数据,BYTE_H,BYTE_M与BYTE_L。
- 距离计算方式如下(单位mm):
- 距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000
- IIC模式
- IIC地址: 0X57
- IIC传输格式:
- 写数据:

- 读数据:

- 写数据:
- 命令格式:

- 向模块写入0X01,模块开始测距;等待200mS(模块最大测距时间)以上。直接读出3个距离数据。BYTE_H,BYTE_M与BYTE_L。
- 距离计算方式如下(单位mm):距离=((BYTE_H<<16)+(BYTE_M<<8)+ BYTE_L)/1000
_IIC_1.png)
_IIC_2.png)
_IIC.jpg)
HY-SRF05
引脚说明

- 引脚说明
- 1、VCC:电源正极,接电压5V DC
- 2、Trig:触发信号,接收MCU发送的控制脉冲
- 3、Echo:反馈信号,向MCU发送数据脉冲
- 4、OUT:开关量输出端
- 5、GND:电源负极,接地

操作说明
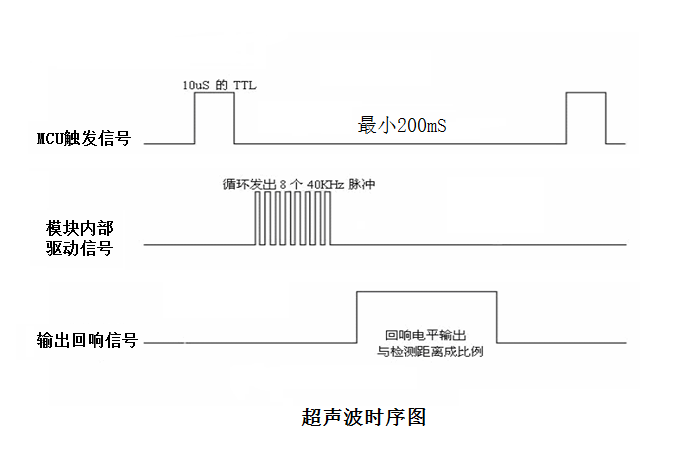
- MCU通过Trig端口向模块提供一个10uS 以上脉冲触发信号。
- 模块内部自动发出8个40kHz周期的方波信号,检测是否有信号返回。
- 检测到有回波信号则通过Echo端口输出回响信号。回响信号的脉冲宽度与所测的距离成正比。
- 发射信号到收到的回响信号时间间隔可以计算得到距离。
- 公式:uS/58=厘米 或 uS/148=英寸 或 距离=高电平时间*声速(340M/S)12:
- 建议测量周期为60ms 以上,以防止发射信号对回响信号的影响。
US-100
引脚说明
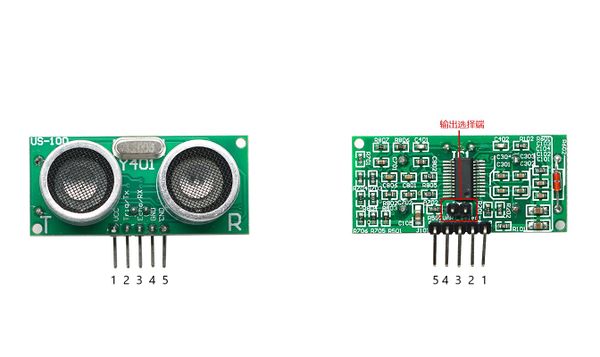
- 1、VCC:电源正极,接电压2.4V-5.5V
- 2、Trig/Tx:接收MCU发送的控制脉冲
- GPIO模式:Trig 触发信号,接外部电路的Trig端
- UART模式:Tx 接收信号,接外部电路的Tx端
- 3、Echo/Rx:向MCU发送数据脉冲
- GPIO模式:Echo 反馈信号,接外部电路的Echo端
- UART模式:Rx 发射信号,接外部电路的Rx端
- 4、GND:电源负极,接地
- 5、GND:电源负极,接地
- 功能选择端说明
- 插上跳线帽时,为UART模式
- 拔掉跳线帽时,为GPIO模式

操作说明
- GPIO测距模式

- 在模块上电前,应先去掉模式选择跳线上的跳线帽,使模块处于电平触发模式。
- 在 Trig/TX 管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
- 当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX 管脚输出。
- 在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过 Echo 端输出一高电平,可根据此高电平的持续时间来计算距离值。
- 即距离值为:(高电平时间*340m/s)/2。
- 注:因为距离值已经经过温度校正,此时无需再根据环境温度对超声波声速进行校正,即不管温度多少,声速选择340m/s 即可。
_1.png)
- UART测距模式

- 在模块上电前,应先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。
- 在 Trig/TX 管脚输入 0X55 (波特率 9600),系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
- 当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过 Echo/RX管脚输出。
- 输出的距离值共两个字节,第一个字节是距离的高 8 位(HDate),第二个字节为距离的低 8 位(LData),单位为毫米。
- 即距离值为 (HData*256 +LData)mm。
_2.png)
- UART测温模式

- 在模块上电前,应先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。
- 在 Trig/TX 管脚输入 0X50 (波特率 9600),系统便启动温度传感器对当前温度进行测量,然后将温度值通过 Echo/RX 管脚输出。
- 测量完成温度后,本模块会返回一个字节的温度值(TData),实际的温度值为 TData-45。
- 例如通过 TX 发送完0X50 后,在 RX 端收到 0X45,则此时的温度值为69(0X45的10进制值)- 45 = 24度。
_3.png)
原理图
使用手册
参考例程
注意事项
- 此模块不宜带电连接,如果要带电连接,则先连接模块的GND。
- 如果测试面不是很规则或测试远距离物体时,可采用多次测量的方法来校正。
- 两次测试间隔要不小于200ms。
FAQ
|
