“Arduino UNO R4 WiFi”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) (创建页面,内容为“{{Product |images=400px |categories={{Category|Arduino}} |brand=丢石头 |features= * ATmega32U4主控 |interfaces= {{Category|…”) |
Yousimaier17(讨论 | 贡献) (→RTC时钟) |
||
| (未显示同一用户的84个中间版本) | |||
| 第1行: | 第1行: | ||
{{Product | {{Product | ||
| − | |images=[[File:Arduino | + | |images=[[File:Arduino UNO R4 WiFi_示意图.png|400px]] |
|categories={{Category|Arduino}} | |categories={{Category|Arduino}} | ||
|brand=丢石头 | |brand=丢石头 | ||
|features= | |features= | ||
| − | * | + | * Renesas RA4M1 (Arm® Cortex®-M4)主控 |
|interfaces= | |interfaces= | ||
{{Category|UART接口}} | {{Category|UART接口}} | ||
| 第11行: | 第11行: | ||
{{Category|PWM接口}} | {{Category|PWM接口}} | ||
{{Category|AD接口}} | {{Category|AD接口}} | ||
| + | {{Category|DA接口}} | ||
| + | {{Category|CAN接口}} | ||
|related= | |related= | ||
* [[Arduino Mega 2560 Rev3]] | * [[Arduino Mega 2560 Rev3]] | ||
* [[ARDUINO UNO REV3]] | * [[ARDUINO UNO REV3]] | ||
* [[ARDUINO NANO]] | * [[ARDUINO NANO]] | ||
| + | * [[Arduino Micro]] | ||
| + | * [[Arduino UNO R4 Minima]] | ||
* [[Mega 2560 Rev3 for Arduino]] | * [[Mega 2560 Rev3 for Arduino]] | ||
* [[UNO REV3 for Arduino]] | * [[UNO REV3 for Arduino]] | ||
* [[Nano for Arduino]] | * [[Nano for Arduino]] | ||
}} | }} | ||
| + | == 产品特点 == | ||
| + | * 板载肖特基二极管用于过压和极性反接保护和ESD保护器件。 | ||
| + | * 与 UNO 外形兼容: 保持了与 UNO R3 相同的外形尺寸、引脚布局和5V工作电压。 | ||
| + | * 内存更大,时钟更快:拥有更大的内存和更快的时钟速度,为更精确的计算和轻松处理复杂项目的能力做好准备。 | ||
| + | * 额外的板载外设:包括 12 位 DAC、CAN BUS和OPAMP。这些额外的元件提供了更多的功能和灵活性。 | ||
| + | * 扩展的24V容差:支持更宽的输入电压范围,允许高达 24 V 的电源。这就实现了与电机、LED 灯条和其他致动器的无缝集成。。 | ||
| + | * 支持 HID:内置 HID(人机接口设备)支持,通过 USB 电缆连接到计算机时,可以模拟鼠标或键盘。 | ||
| + | * Wi-Fi和蓝牙:内置一个 ESP32-S3 模块,使制作者能够为其项目添加无线连接功能。结合 Arduino IoT Cloud,制作者可以远程监控他们的项目。 | ||
| + | * Qwiic 连接器: 具有一个 Qwiic I2C 连接器,可轻松连接到广泛的 Qwiic 生态系统中的节点。适配器电缆还能与基于其他连接器的传感器和致动器兼容。 | ||
| + | * 支持电池供电的 RTC:包含额外的引脚,包括一个用于关闭电路板的 "OFF "引脚和一个用于保持内部实时时钟供电和运行的 "VRTC "引脚。 | ||
| + | * LED 矩阵:配备了明亮的 12x8 红色 LED 矩阵,是制作动画或绘制传感器数据的创意项目的理想之选,无需额外硬件。 | ||
| + | * 运行错误诊断: 包括一个错误捕获机制,可检测运行时崩溃,并提供有关导致崩溃的代码行的详细解释和提示。 | ||
| − | == | + | == 产品参数 == |
| − | * | + | * 微控制器:Renesas RA4M1 (Arm® Cortex®-M4) |
| − | * | + | * 无线模块:ESP32-S3-MINI-1-N8 |
| − | * | + | * 工作电压(逻辑电平):5V(ESP32-S3 为 3.3 V) |
| − | * | + | * 输入电压(推荐值):6-24V |
| − | * 每个I/ | + | * 每个I/O引脚的DC电流:8mA |
| − | |||
* 供电方式(电源自动选择到最高电压源): | * 供电方式(电源自动选择到最高电压源): | ||
| − | ** | + | **Type-C接口 |
| − | ** | + | **VIN引脚输入电压6-24V(VIN) |
| − | ** | + | **外部DC电源输入6-24V |
| − | * 数字I/ | + | * 数字I/O引脚:14 |
| − | * | + | * 模拟输入引脚:6 |
| − | * | + | * 数模转换引脚:1 |
| − | * | + | * 脉宽调制引脚:6 |
| − | * | + | * RA4M1: |
| − | * Flash | + | **Flash Memory:256KB |
| − | * | + | **SRAM:32KB |
| − | * | + | **EEPROM:8KB |
| − | * | + | **时钟频率:48MHZ |
| − | * | + | *ESP32-S3-MINI-1-N8: |
| − | * | + | **ROM:384KB |
| + | **SRAM:512KB | ||
| + | **时钟频率:最高240MHz | ||
| + | * 尺寸:68.6mmx 53.4mm | ||
| + | * 重量:23g | ||
| − | == | + | == 产品详解 == |
| − | *[[File:Arduino | + | *[[File:Arduino UNO R4 WiFi_引脚说明1.png|800px]] |
| − | * | + | === 电源引脚 === |
| − | ** | + | ==== 电源地(GND)==== |
| − | ** | + | ==== 外部电源输入引脚(VIN)==== |
| − | *** | + | *使用外部电源时的输入电压。可通过该引脚供电。 |
| − | *** | + | *推荐输入范围6-24V。板上通过LDO稳压为5V,给系统供电。 |
| − | *** | + | *如果电源电压低于6V,则 5V引脚的电压可能低于5V,电路板可能会变得不稳定。 |
| − | *** | + | *如果使用超过24V,稳压器可能会过热并损坏电路板。 |
| − | ** | + | ==== 5V电源 ==== |
| − | *** | + | *由板上的稳压器输出得的一个的5V引脚(+)。 |
| − | *** | + | *通过5V引脚供电,电压会绕过稳压器,并且有可能会损坏电路板。 |
| − | ** | + | ==== 3V3电源 ==== |
| − | *** | + | * 由主控芯片产生,可给外部3.3V系统供电。 |
| − | ** | + | *通过3.3 V引脚供电电压会绕过稳压器,并且有可能会损坏电路板。 |
| − | *** | + | ==== 系统复位引脚(RESET)==== |
| − | ** | + | *信号为低时复位单片机芯片。 |
| − | ** | + | ==== 模拟参考电压输入引脚(AREF)==== |
| − | * | + | *一般不用连。 |
| − | ** | + | ==== IO口基准电压源(IOREF)==== |
| − | *** | + | *板上的这个引脚提供了微控制器工作的电压基准,为5V。 |
| − | *** | + | |
| − | *** | + | === 输入输出接口引脚 === |
| − | ** | + | ==== 6路模拟输入引脚(A0 - A5)==== |
| − | *** | + | *默认分辨率设置为10 位,可更新为12位和14位分辨率,默认输入信号范围为0到5V,可以通过AREF调整输入上限。 |
| − | *** | + | **引脚读取方式:analogRead() |
| − | * | + | **分辨率配置方式:analogReadResolution(10),详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/adc-resolution #ADC分辨率说明] |
| − | ** | + | *有些引脚有特定功能。 |
| − | *** | + | |
| − | ** | + | ==== 14路数字输入输出引脚(D0 - D13)==== |
| − | *** | + | *工作电压为5V,每一路能输出和接入最大电流为8mA。每一路配置了20-50K欧姆内部上拉电阻(默认不连接)。 |
| − | *** | + | *有些引脚有特定的功能。 |
| − | ** | + | |
| − | *** | + | === 特殊功能 === |
| − | *** | + | ==== USB Serial ==== |
| − | *** | + | *将串行数据发送到计算机是使用标准对象完成的 |
| − | *** | + | *配置方法: |
| − | ** | + | **Serial.begin();//配置波特率 |
| − | *** | + | **Serial.print();//写数据 |
| − | *** | + | *UNO R4 UART端口与USB端口相互独立 |
| − | ** | + | |
| − | *** | + | ==== UART ==== |
| − | ** | + | *提供1路UART引脚(D0、D1), |
| − | *** | + | *D0为RXD,D1为TXD。 |
| + | *系统可通过此引脚与外部实现串口通信。 | ||
| + | *配置方式: | ||
| + | **Serial1.begin();//配置波特率 | ||
| + | **Serial1.read(); //读数据 | ||
| + | **Serial1.write();//写数据 | ||
| + | *UNO R4 UART端口与USB端口相互独立 | ||
| + | |||
| + | ==== PWM ==== | ||
| + | *提供6路8位PWM输出(D3、D5、D6、D9、D10、D11)。 | ||
| + | *可以用作模拟输出引脚。 | ||
| + | **配置方式:analogWrite(pin, value) | ||
| + | |||
| + | ==== DAC ==== | ||
| + | *提供1路DAC引脚(A0),默认分辨率为8位,最高可达12位的分辨率。 | ||
| + | **配置方式:analogWriteResolution(12)。详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/dac #DAC说明] | ||
| + | *可充当真正的模拟输出引脚: | ||
| + | **配置方式:analogWrite(pin, value); | ||
| + | |||
| + | ==== 运算放大器 ==== | ||
| + | *提供1路运算放大器(A1~A3), | ||
| + | *A1为运算放大器同相输入端(OPAMP+) | ||
| + | *A2为运算放大器反相输入端(OPAMP-) | ||
| + | *A3为运算放大器输出端(OPAMPOUT) | ||
| + | |||
| + | ==== IIC ==== | ||
| + | *提供路IIC引脚(A4、A5), | ||
| + | *A4为IIC串行数据线SDA, | ||
| + | *A5为IIC串行时钟线SCL。 | ||
| + | *最多可接入128个IIC设备 | ||
| + | |||
| + | ==== SPI ==== | ||
| + | *提供1路SPI引脚(D10 - D13), | ||
| + | *D10为为CS端:片选端,主设备控制。 | ||
| + | *D11为COPI端:主设备输出端,从设备输入端。 | ||
| + | *D12为CIPO端:主设备输入端,从设备输出端。 | ||
| + | *D13为SCK端:串行时钟信号线,主设备产生。 | ||
| + | |||
| + | ==== CAN ==== | ||
| + | *提供1路CAN引脚(D4、D5),详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/can #CAN总线说明] | ||
| + | *D4为CAN发射器(TX),D5为CAN接收器(RX)。 | ||
| + | *具有符合CAN 2.0A / CAN 2.0B标准的内置CAN模块。 | ||
| + | *需要外接CAN收发器,例如MCP2551或TJA1050 IC。如果没有CAN收发器,则无法与其他CAN设备通信 | ||
| + | *内置Arduino_CAN库用于与其他CAN设备通信。 | ||
| + | **CAN.begin(CanBitRate::BR_250k) //choose from BR_125k,BR_250k,BR_500k,BR_1000k | ||
| + | *构造一个CAN报文并发送: | ||
| + | uint8_t const msg_data[] = {0xCA,0xFE,0,0,0,0,0,0}; | ||
| + | memcpy((void *)(msg_data + 4), &msg_cnt, sizeof(msg_cnt)); | ||
| + | CanMsg msg(CAN_ID, sizeof(msg_data), msg_data); | ||
| + | CAN.write(msg); | ||
| + | *读取传入的 CAN 报文 | ||
| + | **CanMsg const msg = CAN.read(); //read | ||
| + | |||
| + | === 板载LED === | ||
| + | *提供板载LED控制引脚(D13)。 | ||
| + | *Arduino专门用于测试LED的保留接口,输出为高时点亮LED,输出为低时LED熄灭。 | ||
| + | |||
| + | === LED矩阵 === | ||
| + | * 12x8 LED 矩阵可用于显示静态图形、动画,甚至玩游戏。详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/led-matrix/ LED矩阵说明] | ||
| + | ** Arduino_LED_Matrix matrix //初始化 LED 矩阵。 | ||
| + | ** Arduino_LED_Matrix.load() //将帧加载到帧缓冲区中。 | ||
| + | |||
| + | === ICSP引脚(SPI 右上角为1脚) === | ||
| + | *CIPO(1脚):主设备输入端,从设备输出端。 | ||
| + | *+5V(2脚):5V电源 | ||
| + | *SCK(3脚):串行时钟信号线 | ||
| + | *COPI(4脚):主设备输出端,从设备输入端。 | ||
| + | *RESET(5脚):复位端 | ||
| + | *GND(6脚):电源地 | ||
| + | |||
| + | === QWIIC 连接器 === | ||
| + | * Qwiic/STEMMA连接器可用于连接模块,通常允许您以菊花链方式连接多个模块并通过单个连接器控制所有模块。 | ||
| + | * UNO R4 WiFi有两条IIC总线,Qwiic连接器连接到第二条总线上(IIC0).注意:Qwiic 连接器仅为3.3V。 | ||
| + | **如果使用的是 Wire 库,则需要使用对象Wire1而不是对象Wire。如一下示例: | ||
| + | <pre> | ||
| + | #include <Wire.h> | ||
| + | void setup(){ | ||
| + | Wire1.begin(); | ||
| + | Wire1.beginTransmission(1); //begin transmit to device 1 | ||
| + | Wire1.write(byte(0x00)); //send instruction byte | ||
| + | Wire1.write(val); //send a value | ||
| + | Wire1.endTransmission(); //stop transmit | ||
| + | } | ||
| + | </pre> | ||
| + | *引脚说明(从左往右): | ||
| + | **IIC0.SCL:IIC0时钟线 | ||
| + | **IIC0.SDA:IIC0数据线 | ||
| + | **3.3V:3.3V输出线 | ||
| + | **GND:电源地 | ||
| + | |||
| + | === RTC时钟 === | ||
| + | *用于测量时间,详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/rtc RTC说明] | ||
| + | *UNO R4 WiFi具有一个 VRTC 引脚,即使电路板电源被切断,也可通过在此引脚上接入1.6V-3.6V电压用于保持板载 RTC 运行。 | ||
| + | |||
| + | === EEPROM === | ||
| + | *也称为“数据”存储器,是一种即使在电路板断电后也能保留数据的存储器。 | ||
| + | *调用方式: | ||
| + | **EEPROM.write(address, val) | ||
| + | **EEPROM.read(address) | ||
| + | **详查[https://docs.arduino.cc/learn/programming/eeprom-guide #EEPROM说明]和[https://docs.arduino.cc/tutorials/uno-r4-wifi/eeprom #EEPROM指南] | ||
| + | |||
| + | === USB HID === | ||
| + | *可以充当 HID(键盘/鼠标),并通过本机 USB 将击键或坐标发送到您的计算机。详查[https://docs.arduino.cc/tutorials/uno-r4-wifi/usb-hid HID说明] | ||
| + | *调用方式: | ||
| + | **keyboard.press('W'); | ||
| + | **mouse.move(x,y); | ||
| + | **调用可从IDE中的库管理器安装的[https://www.arduino.cc/reference/en/language/functions/usb/keyboard/ 键盘]和[https://www.arduino.cc/reference/en/language/functions/usb/mouse/ 鼠标]库启用 | ||
| + | |||
| + | === ESP32-S3-MINI-1-N8 === | ||
| + | * UNO R4 WiFi 上的 Wi-Fi / Bluetooth LE 模块来自 ESP32-S3 SoC。它采用 Xtensa 双核 32 位 LX7 MCU,内置天线。但WIFI与蓝牙功能不能同时使用。 | ||
| + | * ESP32充当 UNO R4 WiFi 的辅助 MCU,并通过电平转换器与RA4M1 MCU通信。注意,ESP32的工作电压为3.3V,而RA4M1的工作电压为5V。故ESP32的引脚(3.3V)不得与RA4M1的任何引脚(5V)接触,否则可能会损坏电路。 | ||
| + | * '''ESP32 安装了默认固件,设置为与 RA4M1 芯片通信。ESP32 的任何直接编程都将覆盖该固件,芯片之间的通信可能会中断,直到默认固件恢复。''' | ||
| + | * '''覆盖 ESP32 的固件会中断两个 MCU 之间的通信,但可以使它们独立运行。注意:要重新编程ESP32模块,需要在复位电路板时将ESP_Download(ESP接口的5脚)引脚短路至GND。这将使ESP32模块处于引导加载器状态,您可以与其建立连接并对模块重新编程。''' | ||
| + | |||
| + | ==== WIFI ==== | ||
| + | * Wi-Fi支持 802.11 b/g/n 标准(Wi-Fi 4),2.4 GHz 频段 | ||
| + | * 最高 150 Mbps 比特率 | ||
| + | * 要使用UNO R4 WiFi的Wi-Fi功能,请使用UNO R3核心内置的WiFiS4库。[https://docs.arduino.cc/tutorials/uno-r4-wifi/wifi-examples 参考示例] | ||
| + | |||
| + | ==== 蓝牙 ==== | ||
| + | *UNO R4 WiFi 具有蓝牙LE和蓝牙5功能,速度高达2Mbps | ||
| + | |||
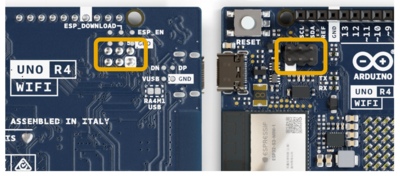
| + | ==== ESP接口 ==== | ||
| + | *[[File:Arduino UNO R4 WiFi_ESP32.png|400px]] | ||
| + | *可用于直接访问ESP32-S3模块。 | ||
| + | *ESP_IO42(1脚 右上角):MTMS调试 | ||
| + | *ESP_IO41(2脚):MTDI调试 | ||
| + | *ESP_TXD0(3脚):串行发射器 | ||
| + | *ESP_DOW(4脚):下载 | ||
| + | *ESP_RXD0(5脚):串行接收器 | ||
| + | *ESP_GND(6脚,有白色标识 左下角):接地 | ||
| + | |||
| + | ==== USB桥接 ==== | ||
| + | * 对UNO R4 WiFi进行编程时,RA4M1 MCU默认通过 ESP32-S3 模块进行编程。可通过更改设置,并通过软件或硬件直接访问 RA4M1 MCU 上的串行总线。方式如下: | ||
| + | **软件:通过将D40的高低电平决定控制哪个MCU连接到 USB 的电路。 | ||
| + | ***当D40为高电平时,RA4M1 连接到 USB 串行端口。 | ||
| + | ***当D40为低电平时,RA4M1 MCU默认通过 ESP32-S3 模块进行编程。就像默认配置一样。 | ||
| + | ***可以通过在void setup()里配置: | ||
| + | ****pinMode(40, OUTPUT); | ||
| + | ****digitalWrite(40, HIGH); | ||
| + | **在UNO R4 WiFi的背面,您会发现标有“ RA4M1 USB”的焊盘。将此焊盘短接可实现将RA4M1连接到 USB 串行端口,而不是ESP32。 | ||
| + | ***[[File:Arduino UNO R4 WiFi_USB桥接.png|400px]] | ||
== 参数对比 == | == 参数对比 == | ||
| − | * [[File:arduino系列开发板_对比.png| | + | * [[File:arduino系列开发板_对比.png|1200px]] |
== 资源下载 == | == 资源下载 == | ||
| − | * [[:File:Arduino | + | *[[:File:Arduino UNO R4 Minima_原理图.pdf|原理图]] |
| − | * [[:File:Arduino | + | *[[:File:Arduino UNO R4 Minima_引脚图.pdf|引脚图]] |
| + | *[[:File:Arduino UNO R4 Minima_RA4M1手册.pdf|RA4M1数据手册]] | ||
| + | *[[:File:Arduino UNO R4 Minima_数据手册.pdf|Arduino UNO R4 Minima数据手册]] | ||
* [https://www.arduino.cc/en/Main/Software Arduino IDE官方下载链接] | * [https://www.arduino.cc/en/Main/Software Arduino IDE官方下载链接] | ||
| − | |||
| − | |||
| − | |||
| − | |||
== FAQ == | == FAQ == | ||
{{Service11}} | {{Service11}} | ||
2023年9月12日 (二) 14:44的最新版本
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||

目录
产品特点
- 板载肖特基二极管用于过压和极性反接保护和ESD保护器件。
- 与 UNO 外形兼容: 保持了与 UNO R3 相同的外形尺寸、引脚布局和5V工作电压。
- 内存更大,时钟更快:拥有更大的内存和更快的时钟速度,为更精确的计算和轻松处理复杂项目的能力做好准备。
- 额外的板载外设:包括 12 位 DAC、CAN BUS和OPAMP。这些额外的元件提供了更多的功能和灵活性。
- 扩展的24V容差:支持更宽的输入电压范围,允许高达 24 V 的电源。这就实现了与电机、LED 灯条和其他致动器的无缝集成。。
- 支持 HID:内置 HID(人机接口设备)支持,通过 USB 电缆连接到计算机时,可以模拟鼠标或键盘。
- Wi-Fi和蓝牙:内置一个 ESP32-S3 模块,使制作者能够为其项目添加无线连接功能。结合 Arduino IoT Cloud,制作者可以远程监控他们的项目。
- Qwiic 连接器: 具有一个 Qwiic I2C 连接器,可轻松连接到广泛的 Qwiic 生态系统中的节点。适配器电缆还能与基于其他连接器的传感器和致动器兼容。
- 支持电池供电的 RTC:包含额外的引脚,包括一个用于关闭电路板的 "OFF "引脚和一个用于保持内部实时时钟供电和运行的 "VRTC "引脚。
- LED 矩阵:配备了明亮的 12x8 红色 LED 矩阵,是制作动画或绘制传感器数据的创意项目的理想之选,无需额外硬件。
- 运行错误诊断: 包括一个错误捕获机制,可检测运行时崩溃,并提供有关导致崩溃的代码行的详细解释和提示。
产品参数
- 微控制器:Renesas RA4M1 (Arm® Cortex®-M4)
- 无线模块:ESP32-S3-MINI-1-N8
- 工作电压(逻辑电平):5V(ESP32-S3 为 3.3 V)
- 输入电压(推荐值):6-24V
- 每个I/O引脚的DC电流:8mA
- 供电方式(电源自动选择到最高电压源):
- Type-C接口
- VIN引脚输入电压6-24V(VIN)
- 外部DC电源输入6-24V
- 数字I/O引脚:14
- 模拟输入引脚:6
- 数模转换引脚:1
- 脉宽调制引脚:6
- RA4M1:
- Flash Memory:256KB
- SRAM:32KB
- EEPROM:8KB
- 时钟频率:48MHZ
- ESP32-S3-MINI-1-N8:
- ROM:384KB
- SRAM:512KB
- 时钟频率:最高240MHz
- 尺寸:68.6mmx 53.4mm
- 重量:23g
产品详解

电源引脚
电源地(GND)
外部电源输入引脚(VIN)
- 使用外部电源时的输入电压。可通过该引脚供电。
- 推荐输入范围6-24V。板上通过LDO稳压为5V,给系统供电。
- 如果电源电压低于6V,则 5V引脚的电压可能低于5V,电路板可能会变得不稳定。
- 如果使用超过24V,稳压器可能会过热并损坏电路板。
5V电源
- 由板上的稳压器输出得的一个的5V引脚(+)。
- 通过5V引脚供电,电压会绕过稳压器,并且有可能会损坏电路板。
3V3电源
- 由主控芯片产生,可给外部3.3V系统供电。
- 通过3.3 V引脚供电电压会绕过稳压器,并且有可能会损坏电路板。
系统复位引脚(RESET)
- 信号为低时复位单片机芯片。
模拟参考电压输入引脚(AREF)
- 一般不用连。
IO口基准电压源(IOREF)
- 板上的这个引脚提供了微控制器工作的电压基准,为5V。
输入输出接口引脚
6路模拟输入引脚(A0 - A5)
- 默认分辨率设置为10 位,可更新为12位和14位分辨率,默认输入信号范围为0到5V,可以通过AREF调整输入上限。
- 引脚读取方式:analogRead()
- 分辨率配置方式:analogReadResolution(10),详查#ADC分辨率说明
- 有些引脚有特定功能。
14路数字输入输出引脚(D0 - D13)
- 工作电压为5V,每一路能输出和接入最大电流为8mA。每一路配置了20-50K欧姆内部上拉电阻(默认不连接)。
- 有些引脚有特定的功能。
特殊功能
USB Serial
- 将串行数据发送到计算机是使用标准对象完成的
- 配置方法:
- Serial.begin();//配置波特率
- Serial.print();//写数据
- UNO R4 UART端口与USB端口相互独立
UART
- 提供1路UART引脚(D0、D1),
- D0为RXD,D1为TXD。
- 系统可通过此引脚与外部实现串口通信。
- 配置方式:
- Serial1.begin();//配置波特率
- Serial1.read(); //读数据
- Serial1.write();//写数据
- UNO R4 UART端口与USB端口相互独立
PWM
- 提供6路8位PWM输出(D3、D5、D6、D9、D10、D11)。
- 可以用作模拟输出引脚。
- 配置方式:analogWrite(pin, value)
DAC
- 提供1路DAC引脚(A0),默认分辨率为8位,最高可达12位的分辨率。
- 配置方式:analogWriteResolution(12)。详查#DAC说明
- 可充当真正的模拟输出引脚:
- 配置方式:analogWrite(pin, value);
运算放大器
- 提供1路运算放大器(A1~A3),
- A1为运算放大器同相输入端(OPAMP+)
- A2为运算放大器反相输入端(OPAMP-)
- A3为运算放大器输出端(OPAMPOUT)
IIC
- 提供路IIC引脚(A4、A5),
- A4为IIC串行数据线SDA,
- A5为IIC串行时钟线SCL。
- 最多可接入128个IIC设备
SPI
- 提供1路SPI引脚(D10 - D13),
- D10为为CS端:片选端,主设备控制。
- D11为COPI端:主设备输出端,从设备输入端。
- D12为CIPO端:主设备输入端,从设备输出端。
- D13为SCK端:串行时钟信号线,主设备产生。
CAN
- 提供1路CAN引脚(D4、D5),详查#CAN总线说明
- D4为CAN发射器(TX),D5为CAN接收器(RX)。
- 具有符合CAN 2.0A / CAN 2.0B标准的内置CAN模块。
- 需要外接CAN收发器,例如MCP2551或TJA1050 IC。如果没有CAN收发器,则无法与其他CAN设备通信
- 内置Arduino_CAN库用于与其他CAN设备通信。
- CAN.begin(CanBitRate::BR_250k) //choose from BR_125k,BR_250k,BR_500k,BR_1000k
- 构造一个CAN报文并发送:
uint8_t const msg_data[] = {0xCA,0xFE,0,0,0,0,0,0};
memcpy((void *)(msg_data + 4), &msg_cnt, sizeof(msg_cnt));
CanMsg msg(CAN_ID, sizeof(msg_data), msg_data);
CAN.write(msg);
- 读取传入的 CAN 报文
- CanMsg const msg = CAN.read(); //read
板载LED
- 提供板载LED控制引脚(D13)。
- Arduino专门用于测试LED的保留接口,输出为高时点亮LED,输出为低时LED熄灭。
LED矩阵
- 12x8 LED 矩阵可用于显示静态图形、动画,甚至玩游戏。详查LED矩阵说明
- Arduino_LED_Matrix matrix //初始化 LED 矩阵。
- Arduino_LED_Matrix.load() //将帧加载到帧缓冲区中。
ICSP引脚(SPI 右上角为1脚)
- CIPO(1脚):主设备输入端,从设备输出端。
- +5V(2脚):5V电源
- SCK(3脚):串行时钟信号线
- COPI(4脚):主设备输出端,从设备输入端。
- RESET(5脚):复位端
- GND(6脚):电源地
QWIIC 连接器
- Qwiic/STEMMA连接器可用于连接模块,通常允许您以菊花链方式连接多个模块并通过单个连接器控制所有模块。
- UNO R4 WiFi有两条IIC总线,Qwiic连接器连接到第二条总线上(IIC0).注意:Qwiic 连接器仅为3.3V。
- 如果使用的是 Wire 库,则需要使用对象Wire1而不是对象Wire。如一下示例:
#include <Wire.h>
void setup(){
Wire1.begin();
Wire1.beginTransmission(1); //begin transmit to device 1
Wire1.write(byte(0x00)); //send instruction byte
Wire1.write(val); //send a value
Wire1.endTransmission(); //stop transmit
}
- 引脚说明(从左往右):
- IIC0.SCL:IIC0时钟线
- IIC0.SDA:IIC0数据线
- 3.3V:3.3V输出线
- GND:电源地
RTC时钟
- 用于测量时间,详查RTC说明
- UNO R4 WiFi具有一个 VRTC 引脚,即使电路板电源被切断,也可通过在此引脚上接入1.6V-3.6V电压用于保持板载 RTC 运行。
EEPROM
- 也称为“数据”存储器,是一种即使在电路板断电后也能保留数据的存储器。
- 调用方式:
USB HID
- 可以充当 HID(键盘/鼠标),并通过本机 USB 将击键或坐标发送到您的计算机。详查HID说明
- 调用方式:
ESP32-S3-MINI-1-N8
- UNO R4 WiFi 上的 Wi-Fi / Bluetooth LE 模块来自 ESP32-S3 SoC。它采用 Xtensa 双核 32 位 LX7 MCU,内置天线。但WIFI与蓝牙功能不能同时使用。
- ESP32充当 UNO R4 WiFi 的辅助 MCU,并通过电平转换器与RA4M1 MCU通信。注意,ESP32的工作电压为3.3V,而RA4M1的工作电压为5V。故ESP32的引脚(3.3V)不得与RA4M1的任何引脚(5V)接触,否则可能会损坏电路。
- ESP32 安装了默认固件,设置为与 RA4M1 芯片通信。ESP32 的任何直接编程都将覆盖该固件,芯片之间的通信可能会中断,直到默认固件恢复。
- 覆盖 ESP32 的固件会中断两个 MCU 之间的通信,但可以使它们独立运行。注意:要重新编程ESP32模块,需要在复位电路板时将ESP_Download(ESP接口的5脚)引脚短路至GND。这将使ESP32模块处于引导加载器状态,您可以与其建立连接并对模块重新编程。
WIFI
- Wi-Fi支持 802.11 b/g/n 标准(Wi-Fi 4),2.4 GHz 频段
- 最高 150 Mbps 比特率
- 要使用UNO R4 WiFi的Wi-Fi功能,请使用UNO R3核心内置的WiFiS4库。参考示例
蓝牙
- UNO R4 WiFi 具有蓝牙LE和蓝牙5功能,速度高达2Mbps
ESP接口
- 可用于直接访问ESP32-S3模块。
- ESP_IO42(1脚 右上角):MTMS调试
- ESP_IO41(2脚):MTDI调试
- ESP_TXD0(3脚):串行发射器
- ESP_DOW(4脚):下载
- ESP_RXD0(5脚):串行接收器
- ESP_GND(6脚,有白色标识 左下角):接地

USB桥接
- 对UNO R4 WiFi进行编程时,RA4M1 MCU默认通过 ESP32-S3 模块进行编程。可通过更改设置,并通过软件或硬件直接访问 RA4M1 MCU 上的串行总线。方式如下:
- 软件:通过将D40的高低电平决定控制哪个MCU连接到 USB 的电路。
- 当D40为高电平时,RA4M1 连接到 USB 串行端口。
- 当D40为低电平时,RA4M1 MCU默认通过 ESP32-S3 模块进行编程。就像默认配置一样。
- 可以通过在void setup()里配置:
- pinMode(40, OUTPUT);
- digitalWrite(40, HIGH);
- 在UNO R4 WiFi的背面,您会发现标有“ RA4M1 USB”的焊盘。将此焊盘短接可实现将RA4M1连接到 USB 串行端口,而不是ESP32。
- 软件:通过将D40的高低电平决定控制哪个MCU连接到 USB 的电路。

参数对比

资源下载
FAQ
|

{kind=link}