“JetRacer AI Kit 教程一、组装小车”的版本间的差异
(创建页面,内容为“==JetRacer AI Kit 教程目录== *JetRacer AI Kit 教程一、组装小车 *JetRacer AI Kit 教程二、安装镜像 *JetRacer AI Kit 教程三、电机驱…”) |
|||
| 第8行: | 第8行: | ||
*[[JetRacer AI Kit |JetRacer AI Kit WIKI 主页]] | *[[JetRacer AI Kit |JetRacer AI Kit WIKI 主页]] | ||
==JetRacer AI 小车组装步骤== | ==JetRacer AI 小车组装步骤== | ||
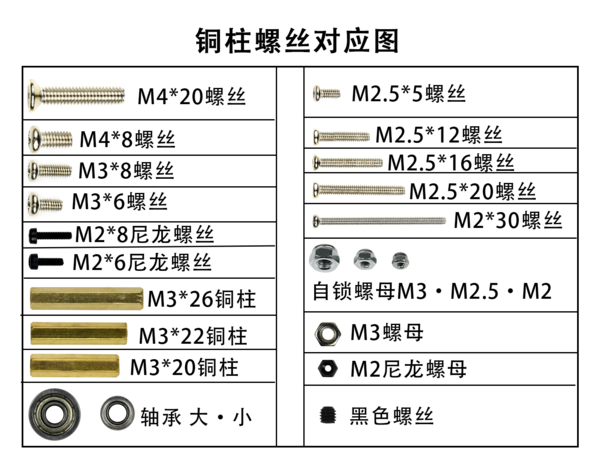
| − | ; | + | ;螺丝包对比图 |
| − | : | + | :方便对比螺丝型号。注意这个图片中不包括舵盘自带的螺丝和风扇自带的螺丝。 |
| − | :[[File: | + | :[[File:jetracer-assembly-20.png|600px]] |
| − | + | ||
| − | :[[File: | + | 1. 将电机固定在金属底盘上,注意这里用的是M3*6螺丝,如果用错成长螺丝会导致电机无法正常转动。 |
| − | + | :[[File:jetracer-assembly-1.png|600px]] | |
| − | :[[File: | + | |
| − | + | 2. 将联轴器装入轮胎中, 注意这里需要使用锤子将其用力击打进入轮胎, 并用M4*8螺丝在另一侧固定。 | |
| − | :[[File: | + | :[[File:jetracer-assembly-2.png|600px]] |
| − | + | ||
| − | :[[File: | + | 3. 将车轮装到电机上,并用黑色螺丝固定,这里需要用到小扳手,使用时用扳手的长端操作。 |
| − | + | :[[File:jetracer-assembly-3.png|600px]] | |
| − | :[[File: | + | |
| − | + | 4. 将舵机固定支架安装到金属底盘上。 | |
| − | :[[File: | + | :[[File:jetracer-assembly-4.png|600px]] |
| − | : | + | |
| − | :[[File: | + | 5. 将舵机固定放置在支架上,并用螺丝螺母固定,注意舵机方向。 |
| − | + | :[[File:jetracer-assembly-5.png|600px]] | |
| − | :[[File: | + | |
| − | + | 6. 在组装舵机拉杆的时候,请注意参照这里示意图的组装方向。 用两个M3球头(小)和短的拉杆组成舵盘拉杆,注意这里两个球头最终呈现的效果是相互垂直的。将舵盘用自带的螺丝固定到舵盘板上,然后用M2.5*12螺丝和M2.5螺母将拉杆(注意是有平头的一边)平头一端锁在舵盘板上。注意舵盘的卡槽是要朝向外侧的。 | |
| − | :[[File: | + | :[[File:jetracer-assembly-6.png|600px]] |
| − | + | ||
| − | :[[File: | + | 7. 组装前轮拉杆,用两个M3球头(大)和长的拉缸组成前轮拉杆。 两个球头程水平状态。将大小轴承分别装入转向杯的轴承槽中。 |
| − | + | :[[File:jetracer-assembly-8.png|600px]] | |
| − | :[[File: | + | |
| − | + | 8.分别用M2.5*16和M2.5螺母将舵机拉杆, 前轮拉杆和转向杯固定在一起,注意舵机拉杆在上面,前轮拉杆在中间,转向北大的轴承要朝向内侧。请注意各个配件的安装方向 | |
| − | :[[File: | + | :[[File:jetracer-assembly-9.png|600px]] |
| − | + | ||
| − | :[[File: | + | 9. 将车轮用M4螺丝和螺母锁在转向杯上。'''注意这里不要锁得太松,避免小车前轮摇晃,也不能锁太紧,导致前轮无法正常转动,锁完,之后请拨动车轮测试一下是否可以顺畅的转动''' |
| − | + | :[[File:jetracer-assembly-10.png|600px]] | |
| − | :[[File: | + | |
| − | + | 10. 将M3*22铜柱和M3螺丝固定在前轮位置,以备后面安装前轮。 | |
| − | :[[File: | + | :[[File:jetracer-assembly-7.png|600px]] |
| + | |||
| + | 11. 将前面组装好的前轮组合装入底盘,首先将舵盘对准舵机装入,然后用M3*6螺丝固定。 两边车轮用M2*30螺丝和M2自锁螺母配合三角板固定住。 | ||
| + | :[[File:jetracer-assembly-18.png|600px]] | ||
| + | |||
| + | 12. 用M3*26铜柱锁在JetRacer扩展板位置,并装入EVA垫, 用M3.20铜柱锁在防撞条位置,并装入EVA垫 | ||
| + | :[[File:jetracer-assembly-19.png|600px]] | ||
| + | |||
| + | 13. 将摄像头支架和天线固定在JetRacer扩展板上。注意安装方向 | ||
| + | :[[File:jetracer-assembly-11.png|600px]] | ||
| + | |||
| + | 14. 将电池根据正确方向装入JetRacer扩展板,并将舵机和电机的排线接入扩展板上,电机左边对左边,右边对右边。接入舵机线的时候注意对好线序。褐色线对GND | ||
| + | :[[File:jetracer-assembly-12.png|600px]] | ||
| + | |||
| + | 15. 调整好舵机和电机的排线,将扩展板用M3螺丝固定在底盘上。 同时用M3螺丝将金属防撞条固定在防撞条上 | ||
| + | :[[File:jetracer-assembly-13.png|600px]] | ||
| + | |||
| + | 16. 用M2.5螺丝将Jetson Nano固定在扩展板上 | ||
| + | :[[File:jetracer-assembly-14.png|600px]] | ||
| + | |||
| + | 17. 拆开Jetson Nano核心板,将无线网卡接入到Jetson Nano,并将天线接好 | ||
| + | :[[File:jetracer-assembly-15.png|600px]] | ||
| + | |||
| + | 18. 装好Jetson nano, 将摄像头用尼龙螺丝装入到摄像头支架上,注意摄像头支架和摄像头之间需要加垫一块亚克力板避免短路。将3D打印的电机盖装入电机上。用6PIN排线连接扩展板和Jetson nano,连接的时候注意根据丝印连接。注意5V对5V, 3.3V对3.3V | ||
| + | :[[File:jetracer-assembly-16.png|600px]] | ||
| + | |||
| + | 19. 将散热风扇用自带的螺丝装入Jetson nano. 注意标签面朝下。风扇排线插入风扇接口,左对齐对好卡槽插入。 | ||
| + | :[[File:jetracer-assembly-17.png|600px]] | ||
2020年1月19日 (日) 09:19的最新版本
JetRacer AI Kit 教程目录
- JetRacer AI Kit 教程一、组装小车
- JetRacer AI Kit 教程二、安装镜像
- JetRacer AI Kit 教程三、电机驱动
- JetRacer AI Kit 教程四、远程遥控
- JetRacer AI Kit 教程五、数据采集
- JetRacer AI Kit 教程六、自主巡线
- JetRacer AI Kit WIKI 主页
JetRacer AI 小车组装步骤
- 螺丝包对比图
- 方便对比螺丝型号。注意这个图片中不包括舵盘自带的螺丝和风扇自带的螺丝。

1. 将电机固定在金属底盘上,注意这里用的是M3*6螺丝,如果用错成长螺丝会导致电机无法正常转动。

2. 将联轴器装入轮胎中, 注意这里需要使用锤子将其用力击打进入轮胎, 并用M4*8螺丝在另一侧固定。

3. 将车轮装到电机上,并用黑色螺丝固定,这里需要用到小扳手,使用时用扳手的长端操作。

4. 将舵机固定支架安装到金属底盘上。

5. 将舵机固定放置在支架上,并用螺丝螺母固定,注意舵机方向。

6. 在组装舵机拉杆的时候,请注意参照这里示意图的组装方向。 用两个M3球头(小)和短的拉杆组成舵盘拉杆,注意这里两个球头最终呈现的效果是相互垂直的。将舵盘用自带的螺丝固定到舵盘板上,然后用M2.5*12螺丝和M2.5螺母将拉杆(注意是有平头的一边)平头一端锁在舵盘板上。注意舵盘的卡槽是要朝向外侧的。

7. 组装前轮拉杆,用两个M3球头(大)和长的拉缸组成前轮拉杆。 两个球头程水平状态。将大小轴承分别装入转向杯的轴承槽中。

8.分别用M2.5*16和M2.5螺母将舵机拉杆, 前轮拉杆和转向杯固定在一起,注意舵机拉杆在上面,前轮拉杆在中间,转向北大的轴承要朝向内侧。请注意各个配件的安装方向

9. 将车轮用M4螺丝和螺母锁在转向杯上。注意这里不要锁得太松,避免小车前轮摇晃,也不能锁太紧,导致前轮无法正常转动,锁完,之后请拨动车轮测试一下是否可以顺畅的转动

10. 将M3*22铜柱和M3螺丝固定在前轮位置,以备后面安装前轮。

11. 将前面组装好的前轮组合装入底盘,首先将舵盘对准舵机装入,然后用M3*6螺丝固定。 两边车轮用M2*30螺丝和M2自锁螺母配合三角板固定住。

12. 用M3*26铜柱锁在JetRacer扩展板位置,并装入EVA垫, 用M3.20铜柱锁在防撞条位置,并装入EVA垫

13. 将摄像头支架和天线固定在JetRacer扩展板上。注意安装方向

14. 将电池根据正确方向装入JetRacer扩展板,并将舵机和电机的排线接入扩展板上,电机左边对左边,右边对右边。接入舵机线的时候注意对好线序。褐色线对GND

15. 调整好舵机和电机的排线,将扩展板用M3螺丝固定在底盘上。 同时用M3螺丝将金属防撞条固定在防撞条上

16. 用M2.5螺丝将Jetson Nano固定在扩展板上

17. 拆开Jetson Nano核心板,将无线网卡接入到Jetson Nano,并将天线接好

18. 装好Jetson nano, 将摄像头用尼龙螺丝装入到摄像头支架上,注意摄像头支架和摄像头之间需要加垫一块亚克力板避免短路。将3D打印的电机盖装入电机上。用6PIN排线连接扩展板和Jetson nano,连接的时候注意根据丝印连接。注意5V对5V, 3.3V对3.3V

19. 将散热风扇用自带的螺丝装入Jetson nano. 注意标签面朝下。风扇排线插入风扇接口,左对齐对好卡槽插入。
