“SIngle ToF”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) (→上位机) |
Yousimaier17(讨论 | 贡献) (→上位机) |
||
| 第103行: | 第103行: | ||
**[[File:SIngle ToF_上位机4.png|400px]][[File:SIngle ToF_上位机5.png|400px]] | **[[File:SIngle ToF_上位机4.png|400px]][[File:SIngle ToF_上位机5.png|400px]] | ||
**设置ID成功后会弹出新的界面出来用来查看测量距离以及对模块进行设置,同时主界面的右侧会出现 添加设备成功 ID:0x50 字样。 | **设置ID成功后会弹出新的界面出来用来查看测量距离以及对模块进行设置,同时主界面的右侧会出现 添加设备成功 ID:0x50 字样。 | ||
| − | **[[File:SIngle ToF_上位机6.png| | + | **[[File:SIngle ToF_上位机6.png|600px]] |
*校准: | *校准: | ||
**连接模组。 | **连接模组。 | ||
2022年10月28日 (五) 15:28的版本
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||
| ||||||||||||||||||||||

测距原理
TOF是Time of Flight的缩写,即飞行时间。具体是指通过周期性的向外发出红外光调制波,当调制波遇到被测目标后反射,然后用传感器接收从被测目标反射回来的调制波。通过测量调制波往返的相位差,可得到飞行时间,从而计算出传感器与物体目标之间的相对距离。示意图如下所示。

引脚说明


- 短接TX与RX引脚后上电可实现硬件恢复出厂设置


产品参数

使用说明
Modbus协议
- 单点TOF激光测距传感器采用了工业标准Modbus协议,Modbus通信指令分为两种,读命令与写命令,
- 读命令(0x03):读取相应寄存器数据。
- 写命令(0x06):向相应寄存器写入数据。
- 具体读写格式如下表:
- 上位机发送数据帧

- 模块回复帧

- 示例:读取测量距离
- 发送指令:50 03 00 34 00 01 c8 45
- 接受数据:50 03 02 07 0B 06 7F
- 数据解析:
- 发送:0x50为Modbus ID(默认),0x03为命令号(读命令),0x34为寄存器地址(测量数据),0x01为读取长度(一位),0xc8 0x45为CRC校验位
- 接收:0x50为Modbus ID(默认),0x03为命令号(读命令),0x02为数据长度(两位),0x07 0x0B为测量数据(0x070B对应的十进制为1803,测量距离为18036mm),0x06 0x7F为CRC校验位。


Modbus寄存器
- 系统恢复
- 寄存器地址:0x00
- 发送格式:

- 说明(0xXX):
- 写入0x01,传感器恢复出厂设置
- 写入0x02,传感器重启

- 波特率设置
- 寄存器地址:0x04
- 发送格式:

- 说明(0xXX):
- 写入0x00,设置波特率为2400
- 写入0x01,设置波特率为4800
- 写入0x02,设置波特率为9600
- 写入0x03,设置波特率为19200
- 写入0x04,设置波特率为38400
- 写入0x05,设置波特率为57600
- 写入0x06,设置波特率为115200(默认)
- 写入0x07,设置波特率为230400
- 写入0x08,设置波特率为460800
- 写入0x09,设置波特率为921600

- Modbus ID设置
- 寄存器地址:0x1A
- 发送格式:

- 说明(0xXX):
- 写入范围为0x00~0xFE,出厂设置默认为0x50

- 测量数据
- 寄存器地址:0x34
- 发送格式:

- 说明:
- 读取数据高8位与距离低8位

- 系统模式
- 寄存器地址:0x38
- 发送格式:

- 说明(0xXX):
- 写入0x00,传感器进入串口打印模式,直接打印字符串。
- 写入0x01,传感器进入Modbus模式(默认)。
- 写入0x02,传感器进入校准模式,校准完成后自动恢复为Modbus模式。

上位机
- 硬件准备:SIngle ToF模块、USB转TTL模块、电脑
- 硬件连接:
- 使用步骤
- 将接好线的USB转TTL模块插入电脑USB接口,打开上位机软件
- 点击上位机软件中的 刷新串口 ,然后选择模块对应的端口号,选择好端口号都点击 连接 。此时右侧的对话框内会出现 串口打开成功 字样。


- 点击左下角的 添加设备 ,在出现的对话框内需要输入模块ID(默认ID为0x50),然后点击 OK。


- 设置ID成功后会弹出新的界面出来用来查看测量距离以及对模块进行设置,同时主界面的右侧会出现 添加设备成功 ID:0x50 字样。

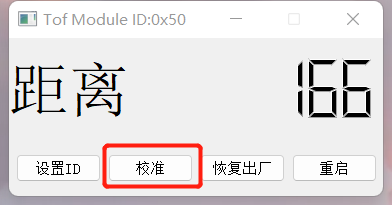
- 校准:
- 连接模组。
- 将模组放在距离白纸10cm的位置,点击 校准 按钮,校准对应ID的模组。
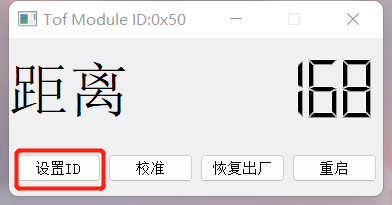
- 设置ID:
- 连接模组。
- 点击 设置ID 按钮,填入新的ID,范围01~fe,十六进制。
- 重启模组生效,生效后需要用新ID重新连接模组。
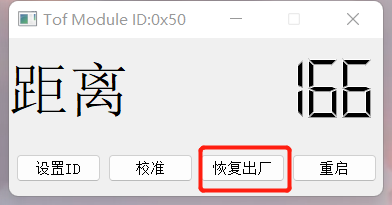
- 恢复出厂:
- 连接模组。
- 点击 恢复出厂 按钮。
- 模组重启生效,生效后需要用默认ID(50)重新连接模组。
- 恢复出厂后会清除校准参数,需重新校准。
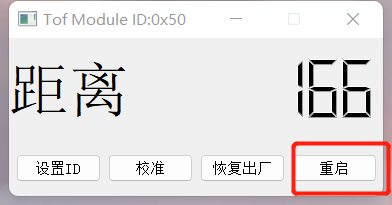
- 重启:
- 连接模组。
- 点击 重启 按钮,对应ID的模组会重启。










Arduino
树莓派
产品资料
FAQ
|
