“Basic Pack Plus For Arduino”的版本间的差异
来自丢石头百科
Yousimaier17(讨论 | 贡献) |
Yousimaier17(讨论 | 贡献) (→激光传感器) |
||
| 第248行: | 第248行: | ||
==== 激光传感器 ==== | ==== 激光传感器 ==== | ||
| − | *[[File:Basic Pack Plus For Arduino_激光头.png| | + | *[[File:Basic Pack Plus For Arduino_激光头.png|300px]] |
*激光是20世纪以来继核能、电脑、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”。英文名Light Amplification by Stimulated Emission of Radiation,意思是“通过受激辐射光扩大”。激光的英文全名已经完全表达了制造激光的主要过程。激光的原理早在 1916年已被著名的美国物理学家爱因斯坦发现。原子受激辐射的光,故名“激光”:原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出。被引诱(激发)出来的光子束(激光),其中的光子光学特性高度一致。这使得激光比起普通光源,激光的单色性好,亮度高,方向性好。 | *激光是20世纪以来继核能、电脑、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”。英文名Light Amplification by Stimulated Emission of Radiation,意思是“通过受激辐射光扩大”。激光的英文全名已经完全表达了制造激光的主要过程。激光的原理早在 1916年已被著名的美国物理学家爱因斯坦发现。原子受激辐射的光,故名“激光”:原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出。被引诱(激发)出来的光子束(激光),其中的光子光学特性高度一致。这使得激光比起普通光源,激光的单色性好,亮度高,方向性好。 | ||
*激光应用很广泛,有激光打标、激光焊接、激光切割、光纤通信、激光测距、激光雷达、激光武器、激光唱片、激光矫视、激光美容、激光扫描、激光灭蚊器、LIF无损检测技术等等。激光系统可分为连续波激光器和脉冲激光器。 | *激光应用很广泛,有激光打标、激光焊接、激光切割、光纤通信、激光测距、激光雷达、激光武器、激光唱片、激光矫视、激光美容、激光扫描、激光灭蚊器、LIF无损检测技术等等。激光系统可分为连续波激光器和脉冲激光器。 | ||
2023年6月3日 (六) 15:25的版本
| |||||||||||||||||||
| |||||||||||||||||||
| |||||||||||||||||||
| |||||||||||||||||||
目录
产品说明

模块说明
主要配件
面包板

- 面包板左右两侧分别有两列电源轨。其中每列中五个孔位为一组。同组之间与各组之间的的孔位是相互导通的,但列与列之间的孔位是互不导通的。
- 中间部分的孔位由最中间的凹槽分隔为左右两侧。每一侧中的每行五个孔位为一组,同组之间的孔位是相互导通的,但行与行之间的孔位是互不相通的。


杜邦线




- 规格:100mm公对公、100mm公对母、200mm公对公、200mm公对母
- 间距:2.54mm
- 耐压:300V
- 最大电流:2A
- 线材外径:1.4mm
- 线芯规格:全铜12芯,线芯直径0.09mm




基础模块
迷你交通灯模块

- 交通灯有两种,给机动车看的叫机动车灯,通常指由红、黄、绿(绿为蓝绿)三种颜色灯组成用来指挥交通通行的信号灯。绿灯亮时,准许车辆通行,黄灯黄闪时,已越过停止线的车辆可以继续通行;没有通过的应该减速慢行到停车线前停止并等待,红灯亮时,禁止车辆通行。给行人看的叫人行横道灯,通常指由红、绿(绿为蓝绿)二种颜色灯组成用来指挥交通通行的信号灯,红灯停,绿灯行。
- 参数说明:
- 尺寸:56*21*11mm
- 固定孔:3mm
- 孔距:15mm
- 颜色:红 黄 绿
- LED:8mm *3
- 亮度:普通亮度
- 电压:5V
- 输入:数字电平
- 接口:共阴极 红黄绿单独控制
- 平台:Arduino、单片机
- 参考例程:Arduino实验一:交通灯实验

RGB模块

- RGB模块可以发出各种颜色的光。红色、绿色和蓝色的三个LED被封装到透明或半透明塑料外壳中,并带有四个引脚。红色、绿色和蓝色三原色可以按照亮度混合并组合各种颜色,因此可以通过控制电路使RGB-LED发出彩色光。
- 参数说明:
- PCB尺寸:19*15mm
- PCB颜色: 黑色
- LED:5mm 共阴
- 亮度:高亮度
- 限流电阻:有
- 输入:PWM
- 工作电压: 3.3V/5V
- 重量: 1.4g
- 平台:Arduino、单片机
- 参考例程:Arduino实验二:RGB彩灯实验

有源蜂鸣器模块

- 有源蜂鸣器是一种一体化结构的电子讯响器,采用直流电压供电,广泛应用于计算机、打印机、复印机、报警器、电子玩具、汽车电子设备、电话机、定时器等电子产品中作发声器件。蜂鸣器主要分为压电式蜂鸣器和电磁式蜂鸣器两种类型。蜂鸣器在电路中用字母“H”或“HA”(旧标准用“FM”、“LB”、“JD”等)表示。
- 有源蜂鸣器内部有一个简单的振荡电路,可以将恒定的DC转换成一定频率的脉冲信号,从而实现磁场的交变,驱动振膜振动发声。但有些有源蜂鸣器在特定交流信号下也能工作,但交流信号的电压和频率都很高,一般不采用这种工作模式。
- 参数说明:
- PCB尺寸:3.2cm*2.3cm
- 驱动:s8050三极管
- 触发:高电平触发
- 电压:5V
- 参考例程:Arduino实验六:有源蜂鸣器模块实验

无源蜂鸣器模块

- 无源蜂鸣器利用电磁感应现象,为音圈接入交变电流后形成的电磁铁与永磁铁相吸或相斥而推动振膜发声,接入直流电只能持续推动振膜而无法产生声音,只能在接通或断开时产生声音。
- 无源蜂鸣器内部没有驱动电路,无源蜂鸣器的工作信号为方波。如果直接施加DC信号给无源蜂鸣器,则没有声音,因为磁路不变,振膜始终处于吸附状态,无法振动发声。
- 参数说明:
- PCB尺寸:3.2cm*2.3cm
- 驱动:s8550三极管
- 触发:低电平触发
- 电压:5V
- 参考例程:Arduino实验七:无源蜂鸣器模块实验

带帽大按键

- 带帽大按键开关模块主要用到的是轻触式按键开关,可作为电子开关,可用作Arduino、单片机等平台的外接设备。具有线路简单,易上手,颜色多样等优点。
- 判断按键是否有两个方法:
- 判断引脚是否为0,此按键模块VCC引脚连接arduino开发板的GND,OUT引脚所接引脚配置为输入上拉模式,GND引脚悬空。
- 判断引脚是否为0,此按键模块VCC引脚连接arduino开发板的VCC,OUT引脚所接引脚需外接下拉电阻,使其在按键未按下时稳定为低电平,GND引脚悬空。(需外接电路,故不推荐)
- 参考例程:Arduino实验三:按键控制LED实验

矩阵键盘

- 矩阵键盘作为单片机的外接设备,当所需的按键数量较多时,为减少I/O口的占用,提高单片机的利用率,通常会将按键排成矩阵形式。即在矩阵键盘中,每条水平线与垂直线之间是通过一个按键连接的,这样单片机的一个8位端口就可以控制4*4=16个矩阵式按键,相较于直接用端口控制按键的方法多出一倍。而且当线路越多时,区别就越明显。
- 参考例程:Arduino实验四:矩阵键盘实验

旋转电位器模块

- 电位器实际上就是可变电阻器,由于它在电路中的作用是获得与输入电压(外加电压)成一定关系得输出电压,因此称之为电位器。通常被制造成不管使用多久均能维持原有的特性,若当位置传感器使用,电位计可以是直线或旋转式位置传感器。电位计输出一个电压值,其正比于沿着可变电阻器之滑动器的位置。因为温度变化、磨耗及滑动器与可变电阻器之间的污垢均会造成电阻变化,影响电位计的精度,因此,电位计有太低的准确度。由于材料的发展,特别是在导电性塑料,使得电位计在使用很长时间后仍可以维持原有特性,同时也改进它们的性能。
- 参数说明:
- PCB尺寸:36mm*24mm*1.6mm
- 电压:3.3V/5V
- 电阻:10K
- 电流:260uA(VCC=5V)
- 参考例程:Arduino实验五:旋转电位器实验

光耦继电器

- 继电器是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器。它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。通常应用于自动化的控制电路中,它实际上是用小电流去控制大电流运作的一种“自动开关”。故在电路中起着自动调节、安全保护、转换电路等作用。
- 参数说明:
- 工作电压:5V
- 负载电流:10A
- 具有输出信号指示灯指示。
- 信号驱动为高低可调。
- 双电源选择设计抗干扰能力强,光电隔离保护可靠性高,驱动能力强,性能稳定。
- 具有二极管续流保护。
- 响应时间小于20毫秒。
- 继电器寿命长可连续吸合10万次。
- 外部连线采用旋转压接端子,使接线更牢固。
- 带固定安装孔,方便安装。
- 参考例程:Arduino实验八:光耦继电器实验

温度传感器
热敏电阻传感器

- 热敏电阻器是敏感元件的一类,按照温度系数不同分为正温度系数热敏电阻器(PTC)和负温度系数热敏电阻器(NTC)。热敏电阻器的典型特点是对温度敏感,不同的温度下表现出不同的电阻值。正温度系数热敏电阻器(PTC)在温度越高时电阻值越大,负温度系数热敏电阻器(NTC)在温度越高时电阻值越低,它们同属于半导体器件。
- 热敏电阻的特点是:
- 热敏电阻模块对环境温度很敏感,一般用来检测周围环境的温度;
- 通过对电位器的调节,可以改变温度检测的阀值(即控制温度值),如需要控制环境温度为50度时,模块则在相应环境温度调到其绿灯亮,DO则输出低电平,低于此设定温度值时,输出高电平,绿灯不亮;
- DO输出端可以与Arduino uno数字3脚直接相连,通过Arduino uno来检测高低电平,由此来检测环境的温度改变;
- DO输出端也能直接驱动继电器模块,由此可以组成一个温控开关,控制相关设备的工作温度,也可以接风扇用来散热等;
- 本模块的温度检测范围为20-80摄氏度;
- 本模块也可以换成带有线的温度传感器,用于水温,水箱等的控制
- 小板模拟量输出AO可以和Arduino uno模拟输入A0端相连,通过AD转换,可以获得环境温度更精准的数值。
- 参数说明:
- 采用 NTC 热敏电阻传感器,灵敏度好
- 比较器输出,信号干净,波形好,驱动能力强,超过 15mA。
- 配电位器调节温度检测阀值
- 工作电压:3.3V-5V
- 输出形式:DO 数字开关量输出 (0 和1) 和 A0 模拟量电压输出
- 设有固定螺栓孔,方便安装小板
- PCB 尺寸: 3.2cm x 1.4cm
- 使用宽电压 LM393 比较器
- 参考例程:Arduino实验九:热敏电阻传感器实验

DHT11温湿度传感器

- DHT11 数字温湿度传感器是一款含有已校准数字信号输出的温湿度复合传感器,内部由一个8位单片机控制一个电阻式感湿元件和一个 NTC 测温元件。与DS18B20数字型温度传感器相比,DHT11 既能检测温度又能检测湿度。DHT11传感器采用单线制串行接口,其Dout引脚接上一个5K的上拉电阻后可直接与单片机的I/O口连接。信号传输距离可达20米以上,具有抗干扰能力强、性价比极高、响应速度快等优点。它应用专用的数字模块采集技术和温湿度传感技术,确保产品具有极高的可靠性与卓越的长期稳定性。
- 参数说明:
- 工作电压:3V-5.5V
- 工作电流 :平均 0.5mA
- 湿度测量范围:20-90%RH
- 湿度测量精度:±5%RH
- 湿度分辨率 :1%RH 8位
- 温度测量范围:0-50℃
- 温度测量精度:±2℃
- 温度分辨率 :1℃ 8位
- 采样周期 :≥1s
- 参考例程:Arduino实验十:DHT11温湿度传感器实验

DS18B20温度传感器

- DS18B20 采用的是单线总线协议方式,即在一条数据线上实现数据的双向传输,而单片机硬件上不支持单总线协议,因此必须采用软件方法来模拟单总线的协议是序来完成对DS18B20 芯片的访问。由于DS18B20 是在一根I/ O 线上读写数据,因此对读写的数据位有严格的时序要求,它有严格的通信协议来保证各位数据传输的正确性和完整性。该协议定义了几种信号的时序: 初始化时序、读时序、写时序。所有时序都是将单片机作为主设备,DS18B20 作为从设备,而每一次命令和数据的传输都是从主机主动启动写时序开始,如果要求DS18B20 回送数据,在进行写命令后,主机需启动读时序完成数据接收。
- 参数说明:
- PCB尺寸:2.1cm*1.0cm
- 分辨率调整范围:9-12位
- 温度测量范围:-55~+125℃
- 温度测量精度:0.5℃
- 工作电压:DC5V
- 数字信号输出
- 参考例程:Arduino实验十一:DS18B20温度传感器实验

土壤湿度传感器
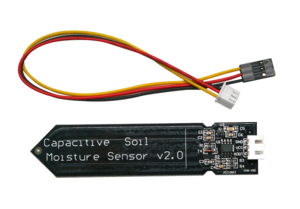
- 电容式湿度传感器是利用湿敏元件的电容值随湿度变化的原理进行湿度测量的传感器。此类湿敏元件实际上是一种吸湿性电解质材料的介电常数随湿度而变化的薄片状电容器,感湿材料为聚酰铵树脂,酰根纤维素和金属氧化物如AL2O3等。
- 电容式土壤湿度传感器区别于市面上绝大部分的电阻式传感器,采用电容感应原理来检测土壤湿度。避免了电阻式传感器极易被腐蚀的问题,极大地延长了它的工作寿命。传感器内置稳压芯片,支持3.3~5.5V宽电压工作环境,这意味着即使在3.3V的Arduino主控板上,它也能正常工作。
- 参数说明
- 工作电压:DC 3.3-5.5V
- 输出电压:DC 0-3.0V
- 接口:PH2.0-3P
- 尺寸:99x16mm / 3.9x0.63“
- 参考例程:Arduino实验二十八:土壤湿度传感器实验

光学传感器
火光/火焰传感器

- 火焰传感器利用特制的红外线接收管通过捕捉火焰中的红外波长来检测火焰,可以检测火焰或者波长在760nm~1100nm范围内的光源或热源,探测角度为60度左右,其中红外光波长在940纳米附近时,其灵敏度达到极限。传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA,配可调精密电位器调节灵敏度。
- 参考例程:Arduino实验十二:火光/火焰传感器实验实验

红外循迹传感器

- 红外循迹传感器采用的是TCRT5000传感器,当TCRT5000的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,光敏三极管一直处于关断状态,此时模块的输出端为低电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,光敏三极管饱和,此时模块的输出端为高电平,指示二极管被点亮。
- 由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常亮。
- 参数说明:
- 采用TCRT5000红外反射传感器
- 检测距离:1mm~8mm适用,焦点距离为2.5mm
- 比较器输出,信号干净,波形好,驱动能力强,超过15mA。
- 配多圈可调精密电位器调节灵敏度
- 工作电压3.3V-5V
- 输出形式 :数字开关量输出(0和1)
- 设有固定螺栓孔,方便安装
- 小板PCB尺寸:3.2cm x 1.4cm
- 使用宽电压LM393比较器
- 循迹模块的工作一般要求距离待检测的黑线距离1-2cm,
- 参考例程:Arduino实验十五:红外循迹传感器实验

光敏电阻传感器

- 光敏电阻是用硫化隔或硒化隔等半导体材料制成的特殊电阻器,其工作原理是基于内光电效应。光照愈强,阻值就愈低,随着光照强度的升高,电阻值迅速降低,亮电阻值可小至1KΩ以下。光敏电阻对光线十分敏感,其在无光照时,呈高阻状态,暗电阻一般可达1.5MΩ。光敏电阻的特殊性能,随着科技的发展将得到极其广泛应用。
- 参数说明:
- 工作电压3.3V-5V
- 使用宽电压LM393比较器
- 设有固定螺栓孔,方便安装
- 采用灵敏型光敏电阻传感器
- 小板PCB尺寸:3.2cm x 1.4cm
- 配可调电位器可调节检测光线亮度
- 输出形式,DO数字开关量输出(0和1)和AO模拟电压输出
- 比较器输出,信号干净,波形好,驱动能力强,超过15mA。
- 参考例程:Arduino实验十四:光敏电阻传感器实验

红外避障传感器

- 该传感器模块对环境光线适应能力强,其具有一对红外线发射与接收管用于检测障碍物,通过电位器旋钮调节检测距离,顺时针旋转时增加有效距离,该模块有效距离范围为2~5cm.。传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。可以应用于流水线计件、机器人避障及黑白线循迹等众多场合。
- 产品说明

- 检测距离可以通过电位器进行调节。顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
- 本模块中监测目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
- 传感器模块输出端口 OUT 可直接与单片机 IO 口连接即可,也可以直接驱动一个5V继电器。
- 比较器采用 LM393,工作稳定。
- 具有3mm的螺丝孔,便于固定、安装。
人体红外热释电传感器

- 参数说明:
- 工作电压:DC5V至20V
- 静态功耗:小于60微安
- 电平输出:高3.3V,低0V
- 延时时间:可调(0.3秒~18秒)
- 封锁时间:2.5秒
- 触发方式:L不可重复,H可重复,默认值为H
- 感应范围:小于120度锥角,7米以内
- 工作温度:-15~+70度
- PCB外形尺寸:32*24mm,螺丝孔距28mm,螺丝孔径2mm
- 感应透镜尺寸:(直径)23mm(默认)
- 参考例程:Arduino实验十六:人体红外热释电传感器实验

激光传感器

- 激光是20世纪以来继核能、电脑、半导体之后,人类的又一重大发明,被称为“最快的刀”、“最准的尺”、“最亮的光”。英文名Light Amplification by Stimulated Emission of Radiation,意思是“通过受激辐射光扩大”。激光的英文全名已经完全表达了制造激光的主要过程。激光的原理早在 1916年已被著名的美国物理学家爱因斯坦发现。原子受激辐射的光,故名“激光”:原子中的电子吸收能量后从低能级跃迁到高能级,再从高能级回落到低能级的时候,所释放的能量以光子的形式放出。被引诱(激发)出来的光子束(激光),其中的光子光学特性高度一致。这使得激光比起普通光源,激光的单色性好,亮度高,方向性好。
- 激光应用很广泛,有激光打标、激光焊接、激光切割、光纤通信、激光测距、激光雷达、激光武器、激光唱片、激光矫视、激光美容、激光扫描、激光灭蚊器、LIF无损检测技术等等。激光系统可分为连续波激光器和脉冲激光器。
- 参数说明:
- 发射功率:150mW
- 标准尺寸:Φ6*10.5
- 工作寿命:1000小时以上
- 光斑模式:点状光斑,连续输出
- 激光波长:650nm(红色)
- 出光功率:<5mW
- 供电电压:5VDC
- 工作电流:<40mA
- 工作温度:-36℃~65℃
- 贮存温度:-36℃~65℃
- 光点大小:15米处光点为φ10mm~φ15mm
- 注意事项
- 此激光头发射的是红色激光束,即平行光束。只有在有雾或者有其他介质的前提下才能看到微弱的红线,而在通常情况下看到的是一个红点。
- 不要对着人的眼睛。
- 参考例程:Arduino实验十七:激光传感器实验

磁性传感器
KY-020倾斜传感器

- KY-020 倾斜开关模块由一个10kΩ电阻器和一个具有双向导电性的金属球开关组成,该开关根据倾斜程度来打开/关闭电路。它不测量倾斜角。当电路向侧面倾斜时,只要以足够的力和倾斜度移动电路,即可激活内部的球开关,从而使电路闭合。以输出低电平电压信号。倾斜传感器模块可和arduino模块数字13接自带LED搭建简单电路,制作倾斜指示灯。利用数字13接口自带的LED, 倾斜开关传感器接口访问数字,当倾斜传感器感测到有按键信号时,LED亮。
- 参考例程:Arduino实验十八:KY-020倾斜传感器实验

SW-18010P振动传感器

- 参考例程:[[]]

磁控管传感器

- 参考例程:[[]]

霍尔传感器

- 参考例程:[[]]

特殊传感器
TTP223电容触摸开关

- 参考例程:[[]]

HC-SR04超声波传感器

- 参考例程:[[]]

水位传感器

- 参考例程:[[]]

声音传感器

- 参考例程:[[]]

MQ-2烟雾气体传感器

- 参考例程:[[]]

灰度传感器

- 参考例程:[[]]

显示模块
MAX7219 点阵模块

- 参考例程:[[]]

74HC595四位数码管显示模块

- 参考例程:[[]]

5V LCD1602

- 1602字符型液晶显示模块是专门用于显示字母、数字元、符号等的点阵型液晶显示模块。分4位和8位数据传输方式。提供5×7点阵+光标的显示模式。提供显示数据缓冲区DDRAM、字符发生器 CGROM 和字符发生器 CGRAM,可以使用 CGRAM 来存储自己定义的最多8个5×8点阵的图形字符的字模数据。提供了丰富的指令设置,清显示;光标回原点;显示开/关;光标开/关;显示字符闪烁;游标移位;显示移位元等。提供内部上电自动复位电路,当外加电源时,自动对模块进行初始化操作,将模块设置为默认的显示工作状态。
- 引脚说明:
- 参考例程:[[]]


电机
直流电机

- 直流电机是最常见的电机类型。直流电动机通常只有两个引线,一个正极和一个负极。如果将这两根引线直接连接到电池,电机将旋转。如果切换引线,电机将以相反的方向旋转。
- 不要直接从Arduino板引脚驱动电机。这可能会损坏电路板。使用驱动电路或IC
- 参考例程:[[]]

ULN2003 驱动板

- 参考例程:[[]]

步进电机

- 参考例程:[[]]

74HC595
- 74HC595是一个8位串行输入、并行输出的位移缓存器:并行输出为三态输出。在SCK 的上升沿,串行数据由SDL输入到内部的8位位移缓存器,并由Q7'输出,而并行输出则是在LCK的上升沿将在8位位移缓存器的数据存入到8位并行输出缓存器。当串行数据输入端OE的控制信号为低使能时,并行输出端的输出值等于并行输出缓存器所存储的值。
- 引脚说明

- Q0--Q7:八位并行输出端,可以直接控制数码管的8个段。
- Q7':级联输出端。将它接下一个595的DS端。
- DS:串行数据输入端,级联的话接上一级的Q7'。
- MR:低电平时将移位寄存器的数据清零。通常接到VCC防止数据清零。
- SH_CP:上升沿时数据寄存器的数据移位。Q0->Q1->Q2-->Q3-->...-->Q7;下降沿移位寄存器数据不变。(脉冲宽度:5V时,大于几十纳秒就行了。我通常都选微秒级)
- ST_CP:上升沿时移位寄存器的数据进入数据存储寄存器,下降沿时存储寄存器数据不变。通常我将ST_CP置为低电平,当移位结束后,在ST_CP端产生一个正脉冲(5V时,大于几十纳秒就行了。我通常都选微秒级),更新显示数据。
- OE: 高电平时禁止输出(高阻态)。如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。比通过数据端移位控制要省时省力。

4位 共阴数码管
- 共阴数码管:将公共极COM接到地线GND上,当某一字段发光二极管的阳极为高电平时,相应字段就点亮,当某一字段的阳极为低电平时,相应字段就不亮。
- 驱动方式:数码管的驱动方式共有两种:静态驱动方式和动态显示方式.
- 静态驱动方式:静态驱动也称直流驱动。指的每个数码管的段选都需要连接一个8位数据线来保持显示的字形码,这8位数据线可通过单片机的I/O口进行驱动,也可使用如BCD码二-十进位转换器进行驱动。当送入一次字形码后,显示字形可一直保持,直到送入新字形码为止。静态驱动的优点是编程简单,显示亮度高,缺点是占用I/O口多,当使用单片机控制n位数码管显示时,需要使用的I/O口则为8*n个。故实际应用时常增加驱动器进行驱动,也因此增加了硬体电路的复杂性。
- 动态驱动方式:动态驱动是指将所有数码管的段选线并联在一起,由位选线控制是哪一位数码管有效。例如当单片机输出字形码时,所有数码管都接收到相同的字形码,然后将需要显示的数码管的位选打开,该位数码管就可将字形显示出来,而没有选中的数码管则不会亮。选亮数码管采用动态扫描显示。所谓动态扫描显示即轮流向各位数码管送出字形码和相应的位选,利用发光管的余辉和人眼视觉暂留作用,只要扫描速度够快,就会使人的感觉好像显示的是稳定的字符,且选中的数码管都在正常显示。与静态驱动相比,动态驱动可节省大量的I/O口,而且功耗更低。但动态显示的亮度比静态显示要差一些,所以在选择限流电阻时应略小于静态显示电路中的。
- 引脚说明


相关例程
相关教程
|